| TOP | ●この頁のTop 数値解析(改訂版) 前輪ロック 車体全体の回転減衰振動 ライダー抛り投げ現象 立ち転けの共通原因 後輪ロックの場合の現象 車体全体の減衰振動 前・後輪ロックの比較 停車時転倒の予防策 ライダー抛り投げ軽減策《??》 足つき性とハンドルの改善 引き起こしの力 完全転倒からの引き起こし |
計算の楽しさと重心の算定 |
| 改定:’17. 9. 22 |
|---|
| ◉ブレーキと立ちごけ |
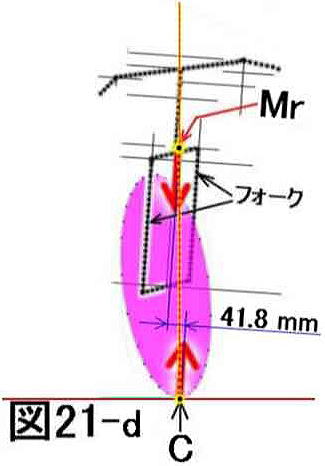
| 見通しの悪い、狭い三叉路で徐行しながら右にハンドルを切って曲がっていたとき、右から違うバイクが急に現れたので、前ブレーキを掛けたところ、右に傾いて転倒してしまいました。また、左側が下り傾斜になっている場所で駐輪しようとして、右の山側に重心を移した状態で停車したかったので、停車する前に一時的に左ハンドルを切ってから前ブレーキを掛けて停車したところ、左側(谷側)に傾き転倒してしまいました。 これ等のハンドルを切りながらの転倒の状況を数値的に解析して、その結果を下の「数値解析(改訂版)」に書いておきました。ただし、その説明で使っている【図21-a~d】は左ハンドルを切っています。 【図21-a~d】は図中に示すキャスター角26°《↓*》のバイクで、25°だけ左ハンドルを切って“本体中心面を直立させた”ときの図ですが、この段階ではタイヤ幅をゼロとしています《タイヤの外周部中心の座標をポケット・コンピューターで計算しているので、正確な図と思って頂いて結構です》。 【図21-a】はバイクの真横から見た図。【図21-b】は本体中心面上の真後ろの点から見た図。【図21-c】はハンドルの回転軸の延長線上《斜め後ろ》の点から見た図です。上部の赤の楕円はタイヤの最外周部(『最外周輪』)を真上から見た図《後述》。 『・・・』は初めての定義を表します。 上記の2つの転倒例で共通するのは、ハンドルを切った(ハンドルを向けた)方に転倒した事で、その転倒の時の感覚は【図21-a】の斜め前方下《フロント・フォーク方向》《↓*1》に車体前部が「沈み込む勢いで転倒してしまった」という感じです。 その車体を沈み込ませる原動力は、車体中心面内を動く 車体各部の慣性力《【図21-b】の上の方の矢印》である為、その力が作用する点と方向は車体中心面内に在ります。ところが、その力の受け止めは車体中心面には無く、右にずれた場所:【図21-b,c】のタイヤの接地点C《↓*1a》が受け止めるので、バイクを左側に倒そうとするモーメントが発生して転倒してしまう訳です《しかし、後述の計算により他にも大きな転倒原因が在りました》。 * ホンダ ホーネットの仕様では25°40′、つまり、25.667°になっています。 *1 フロント・フォークは 中にバネ等が入っている伸び縮みする2本の筒。 *1a 前輪の接地点Cは「ハンドルを向けた方と反対側にずれた位置に在る」というのは、次の実験で分ります。 自転車を停めてハンドルを左に切ったとき、接地点Cの位置は移動しないので、車体の前の方が左にずれます。ということは車体を基準にして見ると、ハンドルを左に切ったとき、前輪の接地点Cは自転車の車体の右側にずれた位置になった事になります。これは地面が、左・右方向や前・後方向に傾斜の付いた場所でも同じ実験結果になります。 勿論、この事はバイクでも同じです。 |
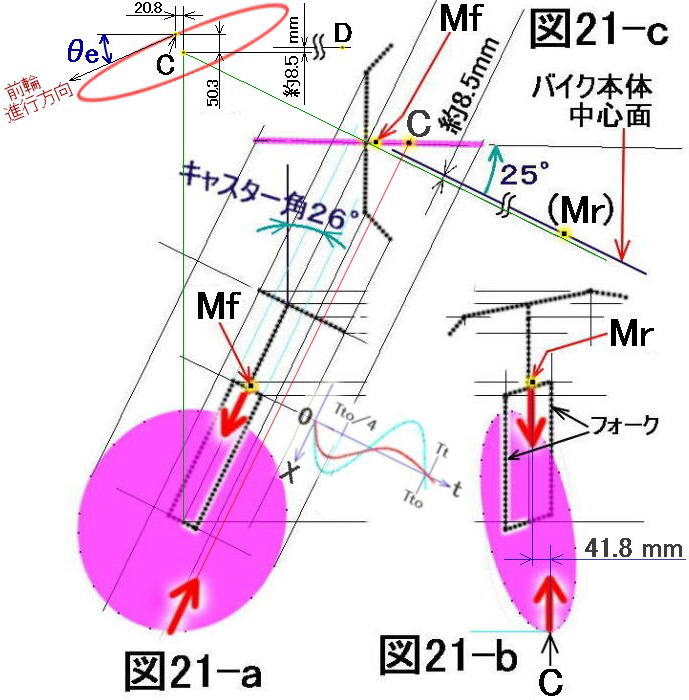 【図21-a~d】は タイヤ幅がゼロの場合の図なので、【図21-a】の上部の赤い楕円(最外周輪)上に接地点Cが在る様に画かれています。しかし、タイヤに幅が有り、且つ、バンク角が後述の δ(1.6926°)で徐行をしている場合の実際の接地点Cは、【図21-a】の上部に示されているC点位置よりも図の下方に 61.5*sin[10.677+δ-1.291]*cos22.729=10.900㎜ だけずれた位置です《61.5mmは前輪タイヤの幅方向曲率半径、10.677°や1.291°については下の注*↑の計算参照》。22.729°は 【図21-a】上部の θe の値です《後述の本文#a参照》。 |
| ◉数値解析(改定版)・・・これが立ち転けの主因 | *↑ この【図21-a,b,c】の本体中心面は路面に対して直立していますが、そのとき前輪は路面からの鉛直線に対して、赤の楕円の寸法(図中の50.3 と20.8)で計算して sin-1[SQR(20.8042+50.3392)/294]=10.677° の傾きを持っています《294mmは前輪タイヤの最外周部の半径》。 いま、ハンドルを25°左に向けて、両足の爪先に力を入れずに《バランスを取りながら》両足を着いて“極く”低速で曲がるときには、ライダーの体重を含めた総重心:Mr が前・後輪の接地線分CDの真上になる様に車体本体の「中心面をカーブの“外側”に傾け」、【図22-k】の δ=0 の状態で曲がります。 そのときの「本体中心面を外側に傾ける」角度は 後述の本文#a 《【図22-l】の左》で計算した結果、1.291°ですが、そうしないで【図21-b】の様に本体中心面を直立させていると、前輪をロックする前から左に倒れようとする力が働いているので、左に倒れ易くなります。その力はMrの高さ位置換算で、 240kgw*15.325/680=5.41kgw もの大きな力となります《15.325mm も本文#aで計算された 前輪タイヤの傾きと前 従って、【図22-k】の δ=0 の状態から速度を上げて普通の徐行スピード:秒速1m/sec にしたときの状態を正確に把握する必要が有ります。そのとき、ハンドル角 25°では、後述《本文#a》の計算で【図22-k】のバンク角 δ は 自然に1.6929°となる事が分ります。 従って、バイク中心面からの前輪接地点Cの「ずれ」《普通の徐行スピードのバンク走行における【図21-d】の「41.8mm」で図示された距離》を『Lcc』[mm] とし、前輪タイヤの太さ:Φ123mm(半径61.5mm)を計算に組み入れると、Lcc の値は Lcc=50.339-61.5*sin(10.677+δ-1.291)*cos22.729-8.5 =30.939 [mm] 《δ=1.6926°》 《↘*3a》 となります《この計算式の中の10.677°は上記 本体直立時の前輪の傾きであり、(δ-1.291)°はバンク時の本体中心面の傾きであるので傾きの向きが少し違いますが、(δ-1.291)の値が小さい(0.402°)ので、そのまま加算しています。また、タイヤ幅が 0 の場合には Lcc の値は【図21-d】のとおり(50.3-8.5=)41.8㎜ になります》。 この、本体中心面からの前輪接地点Cの「ずれ」:距離Lcc[mm] は、後述の「横倒し」の力を計算する為の重要な値となります。 *0 ここで本論からは外れますが、バイクのハンドルの回転軸はバイク本体の中心面に在ります。いま、左側に転倒してしまったバイクを起こし始めるとき、車体が路面から離れた途端、前輪は、ハンドルの回転軸の延長線の後方に在る接地点Cから、車重180kgw《白バイの場合は300kgw位》の数分の1程度の強い力を受けます。その力は、ハンドルの回転軸の延長線を後ろ側に逸(そ)れた位置(C点)で、天頂《真上》の方向に向かっています。ということは、例えハンドルを真っ直ぐに向けていた場合でも、ハンドルを左に《車体が大きく左に傾いているのですから下向きに》回転させようとする大きなモーメント《ハンドルの回転トルク》が発生しています。 つまり、バイクを引き起こそうとした瞬間、ハンドルに意思が有るかの如く、ハンドルは下を向きたがるのです。それに気が付かず、肝心の引き起こしの力を入れる瞬間にハンドルが下を向いてしまうのを許してしまうと、「先日は引き起こせたのに今日は駄目」という事になります。前頁 最後の*18 にその理由が書いて有ります。 |
 *2 今回の改訂ではサスペンションのオイル制動力を微分方程式に加えて正確な解析にしました。 また、サスペンションのバネは、前・後、2機構が有りますが、計算の第一段階では1つに纏めています。 また、最後のページでは車輪の重量を本体と分けていますが、このページでは式と図を単純化する為に車輪の重量をバイク本体側に入れてしまい、バネの先に付いている車輪の質量はゼロとしています。 *2a サスペンションは、バネとオイル・ダンパーから成る車体の支持機構。オイル・ダンパーはシリンダーの中にピストンとオイルが入っていて、バネが伸び・縮みする速さ《=Mrの上下方向の速度》に比例した力《制動力》が発生する機構。 このバネの硬さ等、定数が、前輪と後輪との間に一定の関係を保っていないと、乗り心地が悪いだけではなく、解析も難しくなります。制動係数の単位は [ kg*m/sec2]/[ m/sec] =[ kg/sec] 。 *2b 「タイヤがロックする」というと、一般には「タイヤの回転が停止するけれども、タイヤは路面に対してスリップし続ける」事を意味します。車体の速度が或る程度大きい場合には車体全体の運動エネルギーが大きいので、それをサスペンションのバネの縮みだけでは蓄積しきれず、タイヤが路面に対してスリップする事でその運動エネルギーが消費されます。 しかし、徐行時のブレーキの場合には、車体全体の運動エネルギーは速度の2乗に比例して小さくなる為、この運動エネルギーを主にフロント・サスペンションのバネが位置エネルギーとして溜め込み、急に停まったときでも“タイヤは”スリップせず路面に対して瞬時に停止します《ブレーキを「ジワーッ」と掛けた場合は別です》。 新宿西口の地下駐車場《駐輪場も在り》では「8キロ(/時)《2.2m/秒》以下の徐行スピードで・・・」とアナウンスしていましたが、そんなに速いスピードでの急ブレーキではタイヤがスリップしてしまうかもしれません。 |
|||
| バイクの「立ち転け」は、私の知る限りその殆どがハンドルを切って停車した直後です。直進していた状態から停止しようとして転倒することは、前輪の急ブレーキで前輪タイヤがスリップしてしまったとき以外には、まず有りません。それは最早「立ち転け」ではなく「走行中の転倒」です。このページではハンドルを切って停車したとき、その停車する前のスピードが1[m/sec] 程度の徐行スピードであっても、かなり大きな「横倒し」の力を受け、ハンドルを切っていた方に転倒してしまう現象を解析しています。 そして、前輪ブレーキで停車する場合と後輪ブレーキで停車する場合とで、どの位の違いが有るのかも計算しています。今回の改訂('14.2/16)ではタイヤの太さと徐行時のバンク角も計算しました《また、徐行時の車体本体傾き角(次頁「見掛けのバンク角」)は ほゞ 0°であるのに、静的な重力が転倒の最大原因であることも分かりましたした》。 ◉車体全体の上下振動 《↘*2》 その計算の為には先ず、小さな凹みが有る路面を高速で通過するとき、車体の前部と後部がチグハグな動きをするのではなく、同時性をもって振動し、その振動が時間に対して同じ様に収まる(減衰する)様にサスペンションの定数《→*2a》を決めなければなりません。 そうなる様に前輪と後輪のバネの強さと制動係数《後述》を決めた後で、前輪ロックの場合と後輪ロック《→*2b》の場合の、車体各部の動きを解析します。 今、ライダーの体重を含めた総重心Mrの位置(前頁ではGr)から真下方向に、座標:Z軸をとり、重力とバランスして静かに直進しているときのMrの位置を、Z=0 とします。路面の“一部”が凹んでいる等して、時間 t=0 の直前に、前輪・後輪から同時に《高速走行時は前・後輪の時間差が小さくなります》短時間の力を受けるとMrが上下動をし始めます(Z=0 の位置の 路面からの高さは不変)。 そのときサスペンションのバネは Z だけ縮み、その Z [m] に、前頁で使った前・後輪合わせたバネの硬さ:Kh(=240*9.8/0.08 [kg/sec2] ) を掛けた -Kh*Z [kg*m/sec2] の力をバネは総重心Mrに対して出します《引力とバランスしている状態からの変化分》《縮んだバネは車体を押し上げようとする力を出すので、Z 軸とは逆方向の力》。 また、Mrが Z方向に速度:dZ/dt 《 Z を時間 t で微分する意味》で動くとき、オイル・ダンパー《→*2a》の伸縮の単位速度(1m/sec)当たりの制動力をRz 《制動係数[ kg/sec] と呼ぶことにします》とすると、車体のZ方向の速度とは逆向きの力: -Rz * dZ/dt [kg*m/sec2] の力をオイル・ダンパーが総重心Mrに対して出します。 また、総重心Mrは、総質量Mr [kg]に、加速度: d2Z/dt2 《この記号は Z を時間 t で2回微分する意味》を掛けた値の力: -Mr * d2Z/dt2 [kg*m/sec2] を、Mr自身が慣性力として出します《加速度とは逆方向の力なので、負の記号が付いています》。 t=0 の直前に力を受けたと仮定しましたが、その後は路面も平らで総重心Mrは外力を受けなかったとすると、上記の3つの力の和は 0 なので、次の微分 ↙ |
|||||
| 方程式が成立しています。《→*3》 -Mr*d2Z/dt2 -Rz*dZ/dt -Kh*Z =0 。 (a) この方程式を解く為に、Z を Z=C1/2*[ε(A1*t+j *C2)+ε (A2*t-j *C2) ] (b) 《↘*3a,*4b》 《ただし、j はSQR(-1) という「虚数」で、C1 ,C2はこの時点では任意の定数、A1,A2は特定の複素数》 と置いて、(a)式の Z に(b)式の Z を代入し、その両辺に“-1”を掛けると、(a)式は C1/2*〔Mr*A12+Rz*A1+Kh〕*ε(A1*t+j *C2) +C1/2*〔Mr*A22+Rz*A2+Kh〕*ε(A2*t-j *C2)=0 ・・・・・・・・・(c) となります。t=0 以降、 t が 如何なる値をとっても (c)式が成立する為には、A1 と A2 が、次の A についての2次方程式: Mr*A2+Rz*A+Kh =0 (d) の2根(2つの解)である様にすれば、(c)式の中の2つの〔 〕の中の式の値が両者とも 0 になるので (c)式が成立します。 従って(a)式の Z に、A1,A2 を上記の2根の値にしたときの(b)式の Z を代入すれば(a)式は成立する事になるので、「(a)式の解は、(b)式の時間変化をする Z である」事が分ります。 (d)式の判別式:(Rz2-4*Mr*Kz)が負の値の場合《*4→》 α=Rz/(2*Mr) (e) w=SQR(4*Mr*Kh-Rz2)/(2*Mr) (f ) 《*4a→》 と置くと、(d)式の2根は、2次方程式の根の公式から A1=-α+j *w ,A2=-α-j *w (g ) となります。従って(a)式の解である(b)式は Z=C1/2*[ε〔-α*t +j *(w*t+C2)〕 +ε〔-α*t -j *(w*t+C2)〕 ] =C1/2*ε〔-α*t 〕 *[ε〔j *(w*t+C2)〕 +ε〔-j *(w*t+C2)〕 ] =C1*ε-α*t *cos(w*t+C2) 。 (h) ↙ |
*3 「微分方程式」というと難しい数学の様に聞こえますが、これは高校数学の範囲内です。私がその方程式の解を確認したのは、高校時代から使っている「高校数学・理科
公式集」(旺文社、編者:穂刈四三ニ)という小冊子です。力学的な事も同様です。 *3a “ε” は自然対数の「底」と言われ、 ε=2.718281818284・・・・・・です。 また、文字をあまり小さく出来ないので判り難い《特にブラウザーがGoogle Chrome の場合には不正確になる場合が有ります》のですが、ε・・・・・・は、必ず ε^(・・・・・・) だと思って下さい。 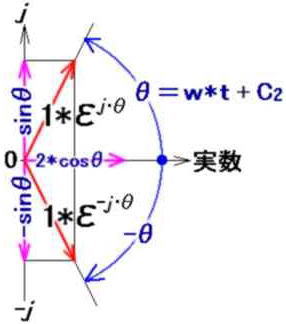 図22-a |
*3a 【図21-c,aの上部】,及び注*↑の中のLcc の計算式中の8.5㎜ という寸法は、ハンドルを25°切ったときのバイク本体中心面からのハンドル回転軸の“ずれ”の、ノギスで測った実測値ですが、バイク(ホーネット)の仕様から計算すると次の様になります。 294㎜(前輪半径)*tan25.667°(キャスタ角)=141.28mm -99㎜(トレール) *sin25°=17.87㎜ という値になるので、上記8.5㎜は17.87㎜ にすべきだったのかもしれませんが、8.5㎜ のままとします。 従って、Lccの値は 30.939-(17.87-8.5)=21.569㎜ にすべきでしたが、30.939㎜のままとします。 *4 Rz を大きくすればその判別式は正になって、【図22-b】の様な「振動」は無くなりますが、制動力とバネの力の和が後述の「押し倒し力」になるので、ハンドルを切りながらの停車のとき転倒する可能性が増えてしまいます。また、路面からダンパーを介して伝わる小刻みの振動も増えてしまいます。 *4a (d)式の解は A=〔-Rz±SQR(Rz2-4*Mr*Kh)〕/(2*Mr) ですが、 (Rz2-4*Mr*Kh) < 0 の場合としているので、 A=-Rz/(2*Mr)±j *〔SQR(4*Mr*Kh-Rz2)〕/(2*Mr) =-α ±j *w としたので、(g)式のαとw は (e)式と(f)式の様になります。 *4b 普通、「虚数」を使われて、それが何時の間にか実数だけになってしまうと、何かちょろまかされた様な気がするものです。 しかし、求めようとしている解:Z を、最初から、左記の様に「(b)式の様な形をした関数が“足されたもの”」と仮定しておけば《文中ではその“仮定”を「 Z を・・・と置いて」と表現しています》、疑いの余地は無くなります。 |
| この様に [ ] の中の虚数項が無くなってしまうのは、【図22-a】に示されている εj *θ と ε-j *θ のベクトルを足す(合成する)と、j *sinθ と -j *sinθ とが打消し合って、2*cosθだけが残る事でも分ります《→*4b》。 t=0 の直前に、極く短時間で大きな力を加えられて、重心Mrは Z 方向の速度を得ますが、その速度を時間で積分したものが Z である為、 t=0 の時点では Z はまだ Z=0 です。 従って、(h)式の cos(w*0+C2) は 0 でなければならず《→*4c》、且その直後から Z は正の値になって増え始めるので C2 =-π/4 [rad] =-90° でなければなりません。 故に(h)式は Z=C1*ε-α*t *sin(w*t) ( i ) となり、総重心Mrが【図22-b】の赤線の様に正弦波の減衰振動をしている事が分ります。いま、 Tt=2π/w ( j ) 《→*5》 とおくと、( i )式は Z=C1*ε-α*t *sin( 2π*t/Tt ) ( k ) となるので、Tt が、Z の振動の周期である事が分ります。 ( j )式と( f )式から Tt=2π*(2*Mr)/SQR(4*Mr*Kh-Rz2) =2π*SQR(Mr/Kh)/SQR〔1-Rz2/(4*Mr*Kh)〕 =Tto/SQR〔1-Rz2/(4*Mr*Kh)〕 [sec] (m)。 ただし、Tto はオイル制動が無い場合の振動の周期: Tto=2π*SQR(Mr/Kh) (n) =0.567691 [sec] 。 Mr も Kh も既に値が決まっているので、ここでオイル制動の大きさ(制動係数)を決めます。(m)式の〔・・・・・・〕の中の第2項 ↗#A |
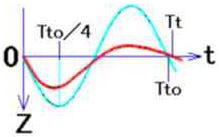 図22-b #A は、第1項の1に比べて小さい事が後で分るので《→*6》、時間:t が Tto/4 [sec] 経つ毎に、振幅 Z は(k)式に基づき【図22-b】の様に 0.6倍に減衰するものとします《→*6a》。 ε-α*t=ε-α*Tto/4=0.6 。 この α は『減衰の速さ』と言えるもので、(n)式,(e)式から α=-LN0.6 *4/Tto =2.0433/Tto 《→*7》 =3.5993 [/sec] =Rz/(2*Mr) ∴Rz=α*(2*Mr) (p) =1727.7 [kg/sec] となります。従って、(m)式のTt の値は Tt=0.60032 [sec] 。 以上の数値例に基づいて正確に画いたグラフが【図22-b】です《水色の線はダンパーが無い場合の振動》。 いま、【図22-d】の様に総重量 Mr を前部 Mf 137kg と後部 Mb 103kg とに(約 4:3の比率に)分け《→*8》 (Mr=Mf+Mb) 、 それぞれの質量を点Mf,Mbの1点に集中した鉛の塊に代表させ、且、2つの塊は軽くて理想的な構造材で連結されていて、 ↙#B |
*4c 数学的には Z=0 である為に C1=0 もあり得ますが、その場合には Z を微分した速度も 0 となってしまい、t=0 の直前に加えられた力の運動量が
0 になってしまうので、それはあり得ません。 *5 “2π”は、“2*π”の “*”を省略しています。 *6 Rz2/(4*Mr*Kh)=0.10576・・・ *6a 1周期では 0.64=0.1296 倍に減衰します。 *7 LN は上述の ε を何乗したらその数字《今の場合0.6 》になるかという記号で、自然対数と言います。例えば LN 2.71828・・・=1 LN(1/2.71828・・・)=-1 LN 0.6=-0.51083・・・ εー0.51083・・・=0.6 *8 前部の質量を、137kgと、後部の質量103kgに比べて大きくしたのは、やや重心に近いフロント・フォークの位置に前部の塊Mfが在ると仮定したかったからです。 |
| #B そのうちの前部の塊Mfは【図21-a,b】のフロント・フォークの上部(本体側)に付いているものとし、後部の塊Mbも路面から同じ高さで、且、後輪軸の真上に在るものとします。 更に、サスペンションのバネの上下方向のバネの硬さも、今まで前・後輪合わせていたバネの硬さ Kh を、前輪と後輪の上下方向の硬さに振り分け、それぞれ Ks ,Ku とします。同様に前・後の2つのサスペンションのオイル・ダンパーも、前・後輪合わせていた上下方向換算の制動係数 Rz を、前輪と後輪の上下方向の制動係数に分け、それぞれ Rzs ,Rzu とします。《→*8a》 そして、バネの強さ及び制動係数の値の、車体の「全体:フロント:リア」の比率を、「Mr : Mf : Mb」と同じ“比率”〔240 : 137 : 103〕にします。 つまり、先ずバネの硬さの「全体:フロント:リア」の比率を 〔Kh : Ks : Ku〕=〔240 : 137 : 103〕 にし、同様に、制動係数の「全体:フロント:リア」の比率も 〔Rz : Rzs : Rzu〕=〔240 : 137 : 103〕 にします。 そうする事によって、例えば車体を前・後に切り離し、「後部」だけに着眼して運動方程式を立てると、(a)式の係数がMr,Rz,Kh から Mb,Rzu,Ku に替わっただけであり、その係数の比は Rzu/Mb=Rz/Mr ,Ku/Mb=Kh/Mr (q) となっているので、係数を入れ替えて計算される「後部」の「減衰の速さ」を示す(e)式の α の値は、車体全体の上下動の場合と全く同じ値になります。 係数を入れ替えて計算される「後部」の振動の速さ(角速度)を示す( f )式の w も全く同じ値になり、従って ( j )式により振動の周期:Tt の値も全く同じ値になります。 ↗#C |
#C 同様に「前部」の各係数の比も、 Rzs/Mf=Rz/Mr ,Ks/Mf=Kh/Mr (r) となっているので、「前部」の「減衰の速さ」:αと振動の周期:Tt は、車体全体の上下動の場合と全く同じになります。 従って、前輪と後輪に同時に、極く短い時間、同じ力を受けた場合、例え上記の「連結の構造材」が無くても《→*9》原理的には車体の前部と後部とは同じ動きをし、従って「連結の構造材」が有る場合にも 前後が傾いたり、チグハグな動きをすることはありません。 勿論、前後のダンパーによって動きは速やかに減衰するので、正確に比率を合わせる必要は無いのですが、もし、それが大きく異なっていると前・後の動きに違いを感じてしまうでしょう。 その為、上記「比率」は同じにしてある事を前提にします。従って Rzs=Rz*Mf/Mr =986.21 [kg/sec] Rzu=Rz*Mb/Mr =741.46 Ks=Kh*Mf/Mr =16782.5 [kg/sec2] Ku=Kh*Mb/Mr =12617.5 。 これ等の係数《上下方向換算の値》が決定したので、先ず前ブレーキで停車したときの動作解析を行います。 ↙#D |
*8a 車体前部のサスペンションは バネもダンパーもフロント方向に付いていますが、解析を簡単にする為に先ずは上下方向換算の強さを決めます。 *9 ただし、1輪車の様に前部の塊Mfの真下にサスペンションと車輪が在る場合。 |
| #D ◉前輪ロックの場合の現象 上の項では先ず直線走行時の解析をして上記各係数を決定しましたが、徐行しながら小さな交差点を鋭角に曲がるときには、車体はほぼ直立に近い状態で、ハンドルも大きく切って曲がります。 今、徐行スピードが1.0 [ m/sec](3.6 km/時)《この速度をV1とします》で、ハンドルを 左に25°切って曲がっていたとします。 このとき前ブレーキを掛けると、それほど強く掛けなくてもスピードが出ていないので前輪がロックして、フロント・フォークの下部は前輪と一体の物になり《→*10》、その瞬間を t=0 とします。 その時間の後、 フロント・フォークの中のバネが縮みますが、その縮みを X [m] とすると点Mf は車軸に対して斜め下に X だけ近づくので《→*11》、ロック前は水平だった線分MfMbが小さな角度だけ前屈みに傾きます。 その傾いた角度を θ [rad]《→*11a》とすると、フロント・フォークも真横から見て θ だけ左回転をし、フロント・フォーク下部と前輪とは一体化しているので前輪も路面に対して θ の角度だけ左「回転」し、前輪の車軸は水平方向に θ*Rf 《Rf は前輪の半径》だけ前進(移動)します。更に、前輪の車軸から点Mf までの距離を Los とすると、フロント・フォークの θ の回転により点Mf はフロント・フォークと直角方向(斜め上方向)に、車軸に対して相対的に θ*Los だけ移動します。 X を時間 t で微分した速度を Vx [m/sec] 、θ を時間で微分した角速度を ω [rad/sec] とすると、上記3つの移動《 X,θ*Rf,θ*Los 》によって、Mf は前輪がロックした直後の時間( t =0 )に、【図22-c】の様にそれぞれの方向の速度: Vx ,ω*Rf ,ω*Los [ m/sec] を、方向を考慮して加算:つまり「ベクトル的に加算」した速度《Vs とします》で移動する事になります。 一方、後部の塊の点Mbは、【図22-c】の様に加算されたMfの動きに加えて 上記 θ の傾きにより点Mbの高さが点Mfより #E ↗ |
#E も相対的に Y [m]だけ真上方向に高くなったとします。 すると Y=θ*Lsb 《ただし、Lsb はMf~Mb間の距離》 の関係が有るので、Y を時間 t で微分した速度を Vy [m/sec] とすると Vy=ω*Lsb となります。 従って、点Mbの速度は【図22-c】の様に、速度Vs に速度Vy をベクトル的に加算した速度となります。これをVu とします。 以下、Mf とMb の、それぞれの速度と運動量《質量×速度》を、フロント・フォーク方向《斜め下向きを正とします》と、それと直角方向《斜め上向きを正とします》に分けて計算します。 Mfの速度Vs のフロント・フォーク方向成分を Vfx とし、それと直角方向成分を Vfv とすると【図22-c】から Vfx=Vx+ω*Rf *sin θca (1) Vfv=ω*Rf *cos θca+Los*ω 。 (2) 一方、Mbの速度:Vu のフロント・フォーク方向成分を Vbx とし、それと直角方向成分を Vbv とすると【図22-c】から Vbx=Vfx-Vy*cos θca (3) Vbv=Vfv+Vy*sin θca 。 (4) フォロント・フォークの中のバネの力は直進走行時は重力とバランスしていて、そのバネの力はバランス状態からの変化分だけを考える為、t=0 の時はバネの力はゼロです。 ↙#F |
*10 フロント・フォークはその上部が車体本体に固定され《勿論ハンドルによる回転可能》、下部には前輪が付いていて上部に対して動きます。フロント・ブレーキは必ずその下部に付いています。 また、ブレーキに掛ける力が或る大きさになるとブレーキ・シューと前輪とが一体になるのは、その間の摩擦が「粘性摩擦」ではなく「静止摩擦(クーロン摩擦)」だからです。」 *11 いまタイヤの凹みをバネの縮みに含めているので、フロント・フォークのバネの縮みは左記 Los の縮みになります。 *11a 「ラディアン」[rad] は角度の単位。円周の一部の長さが半径と等しいとき、その角度が1[rad]。 1[rad]=(180/π)°≒57° *12 ダンパーは t=0 の瞬間から力を発生しますが、その力を時間で積分しないと運動量の変化にならないのです。 *12a 「前輪ロック前のMfとMb は、フロント・フォークと一体になって水平速度:V1で進んでいたので、ロック前のフロント・フォーク方向の速度はゼロではないか」と御指摘になるかもしれません。 しかし、座標が走ること自体は構いませんが、座標が走っている途中でブレーキを掛けたから止まるという都合の良い事を許すと、運動量を計算する為の速度の基準が無くなってしまいます。フロント・フォークの「現物」上で考えるのではなく、フロント・フォークの傾きをした「座標」が、前輪ロックの地点で「待っていた」と考えるべきです。 |
| #F 同様にフロント・フォークの中のオイル・ダンパーも、前輪ロックする瞬間の極く短時間では運動量に変化を与える様な力を出していません。 従って、フロント・フォークは、それと直角方向の力は伝えますが、フロント・フォーク方向にはロックした瞬間に運動量に変化を与える様な力は発生しません《↗*12》。 その為、前輪ロック直後の、フロント・フォーク方向の運動量:つまり (1)式,(3)式のVfx,Vbx に それぞれ Mf ,Mb を掛けたものの和は、前輪ロック前のフロント・フォーク方向の速度: V1*sin θca 《↗*12a》 に全重量 Mr を掛けた運動量の値から変化しません。従って、 Mf*Vfx+Mb*(Vfx-Vy*cos θca)= Mr*Vfx-Mb*Vy*cos θca =Mr*V1*sin θca (5) ∴Vfx=(Mr*V1*sin θca+Mb*Vy*cos θca)/Mr となりますが、この Vfx を、(1)式を変形した式: Vx=Vfx-ω*Rf*sin θca に代入すると、 Vx=(Mr*V1*sin θca+Mb*Vy*cos θca)/Mr -ω*Rf *sin θca 。 (6) この新しい Vx の値を使い、次の式 《 (1)式,(2)式と全く同じです》でVfx とVfv を再計算します。 Vfx=Vx+ω*Rf *sin θca (7) Vfv=ω*Rf *cos θca+Los *ω 。 (8) フロント・フォーク方向の運動量を規定した(5)式を次の様に変形して Vy の値を求め、その値を使って車体の前のめりの傾き θ の角速度:ω を求めます。 Vy=Mr*(Vfx-V1*sin θca)/(Mb*cos θca) (9) ω=Vy/Lsb 。 (10) 《↘*13》 |
|||||
 図22-c 図中のθso は11.51°、θu+θca+90°=29.964° |
|||||
| Vfx とVfv は新しい値にしてあるので、それ等を使って、Mb のフロント・フォーク方向の速度と、それに直角方向の速度を計算します。 Vbx=Vfx-Vy*cos θca (11) Vbv=Vfv+Vy*sin θca 。 (12) Mf,Mb それぞれの合成速度の大きさをVs,Vu とすると Vs=SQR(Vfx2+Vfv2) (13) Vu=SQR(Vbx2+Vbv2) 。 (14) 《↘*13a》 すると、前輪ロック後の全運動エネルギー《Et とします》は Et=Mf/2*Vs2+Mb/2*Vu2 。 (15) 前輪ロック前の全運動エネルギー《Etoとします》は Eto=Mr/2*V12 なので、全運動エネルギーの、前輪ロック前・後の比を Kv=Et/Eto (16) とすると、前輪ロックの前・後で運動エネルギーは変わらないので、本来は Kv=1 (α) でなければなりません。ここで一般的な連立方程式の解き方では、上述の全ての式を使った「変形」や「代入」を行い、例えばVy以外の全ての変数を「消去」してこの(α)式を Vy だけの等式にし、「Vy=・・・・・・」という解に至ります。しかし、これは大変な作業で途中で間違えたりするので、全ての演算の基となる Vx と Vy に次の「補正」を行います。 Vx=Vx/Kv0.5 ,Vy=Vy/Kv0.5 。 (17) この補正後、(6)式に戻り、(17)式までの演算を繰り返して正確な未知数群を求めていきます《ただし、(α)式は演算不要》。 この繰り返し演算を、全ての未知数が収斂するまで行なう事は、(6)式から(16)式までと(α)式との「12式からなる連立方 |
 図22-d この図の「後輪ロックの場合」の「フック」は、ブレーキで停止した瞬間に限定しています。 その後は「フック」は無くなり、タイヤは僅かに進行方向に転がります。 |
||||
| 程式」を解いている事になりますが、本当の未知数は Vx と Vy だけなので、厳密には「2元連立方程式」なのかもしれません。 その場合、運動量や運動エネルギーなどから成立しなければならない基本の式は(5),(α)の2式です。 実際の計算では、仮の初期入力値を例えば、Vx=1.0 ,Vy=0.5[m/sec] とし、前輪半径:Rf=0.294[m]、前輪の車軸から「前部の塊」Mfまでの距離:Los=0.42946[m]、MfからMbまでの距離:Lsb=1.21[m] 《以上は【図22-d】から比例計算で、Mf 137kg とMb103kg の位置と振り分けは推定》、キャスター角:θca=26°、前輪ロック前スピード:V1=1.0[m/sec]、の数値を、(7),(8),(11),(12)式に代入して Vfx,Vfv,Vbx,Vbv を求めておいた上で、上記の(6)~(17)式の繰り返し演算を行います。 このとき(17)式は、 ^0.5ではなく ^0.3にすると、収斂するときのオーヴァー・シュートが少なく、早く収斂します。そうすると、18回目の演算からは、Vs の上5桁が最終値になります。 結果は Vx=0.714700 Vy=0.989649 [m/sec] Vs=0.997259 Vu=1.003635 [m/sec] ω=0.817892 [rad/sec] 。 Vfx=0.820110 ,Vfv=0.567401 m/sec 《→*13b》 Vs ,Vu の、フロント・フォーク方向に対する角度を θs,θu とすると、 Vbx=-0.069379 ,Vbv=1.00123 m/sec θs=atn(Vfv/Vfx) =34.6777° θu=atn(Vbv/Vbx) =-86.0361° (=93.9639°) となります。《Vs とVu は【図22-c】の青のベクトル》。 ここで、これ等の解によって本当にフロント・フォーク方向の運動量が 前輪ロックの前・後で変わらないかどうか確かめます。 ロック前の上記方向の運動量は Mr*V1*sin θca =105.2090752 [kg*m/sec] 。 ロック後は #G↗ |
#G Mf *Vfx+Mb *Vbx =105.2090752 [kg*m/sec] となって、ピシャリと一致します。 次に、点Mf ,Mb からそれぞれの速度ベクトルVs ,Vu な直角に線を引き、その交点をPoとすると、【図22-c】に示す角度:θsp ,θbp は θsp=θs+θca =60.6777° θbp=-θu-θca =60.0361° であるので、【図22-c】に示す各線分の長さは Lsp=Lsb/(cos θsp+sin θsp/tan θbp)=1.21930 [m] Lpv=Lsp*sin θsp =1.06309 [m] Lbp=Lpv/sin θbp =1.22710 [m] 。 ↙#H |
*13 (9)式も、(6)式と同様、フロント・フォーク方向の運動量を規定した(5)式の変形に過ぎません。 *13a Vfx2 は Vfx^2 のこと。 *13b 単位の[ rad] は一般には省略する事が多いのですが、書いておくと間違いチェックになるので一応書いておきます。 |
| #H ◉車体全体の回転減衰振動(前輪ロック時) |
|||||
| ここで前輪ロック直後(t=0)の点:Mf とMb の動きの、Poを中心とした場合の角速度を計算してみると、 Vs/Lsp=0.8178913 [rad/sec] Vu/Lbp=0.8178913 [rad/sec] 《→*14》 となって、上述の線分MsMbの傾きの角速度 ω とも一致しています。つまり、ロック直後の少なくとも微小時間の間、バイクは地面下38.3cm《 Lpv-0.68=0.38309 [m] 》の架空の回転軸Poを中心に回転していると言えます。 バネの縮み X の速度Vx は、【図22-c】に見られる様に点Mf の速度Vs の構成要素(速度成分)であるので、 Vs と Vx とは常に或る比率《この Vx/Vs を Kxs とします》を保ちながら変動をしています。 《 Kxs=0.7147000/0.9972587 =0.716665》 従って、両者《Vs と Vx 》を時間 t で積分した変位(移動量)であるところの“θ*Lsp” と“X”とは互いに上記の比率:Kxs を保っています《→*14a》。 従って、いま点Poを架空の回転軸にして小さな角 θ 《単位は[rad] 》だけ車体が左回転すると、Mf はVs の方向に Lsp*θ だけ動き、その値に Kxs を掛けた値がフロント・フォークのバネの縮み X となります。またMbのVu 方向への動きは Lbp*θ であるので、前輪のバネの縮み X と,後輪のバネの真上方向の伸びは、それぞれ Lsp*θ*Kxs , Lbp*θ*cos θbp となります。 上述の「◉車体全体の上下振動」の最後で、前輪と後輪の、バネの上下方向の硬さをそれぞれ Ks,Ku と決めました。 そのフロント・フォークの中に入っているバネ現物の硬さを『Ksc』とすると、そのバネが X だけ縮むとバネが実際に出している力は フロント・フォーク方向に Ksc*X であるので、 ↗#I |
#I その力 そのときバネは真下方向に X*cos θca だけ縮むので、フロント・フォークのバネは、真下方向の硬さとしては ( Ksc*X =Ksc/(cos θca )2=Ksc/0.80783 のバネの働きをしている事になります。この真下方向のバネの硬さが、上述の、決められた Ks (=16782.5)でなければなりません。 ∴Ksc=Ks*0.80783 = となります。リア・サスペンションのバネの硬さは、決められたとおりのバネの硬さ: Ku =12617.5 [kg/sec2] です。 上記フロント・フォークのバネ自体の縮み,及び後輪のバネ自体の伸びの値に、それぞれのバネの硬さ Ksc,Ku を掛けると Lsp*θ*Kxs*Ksc , Lbp*θ*cos θbp*Ku の力をフロント・フォークの斜め上方向,及び後輪の真下方向《Mbを引っ張る方向》に出します。これ等の力に、それぞれ cos θs*Lsp , cos θbp*Lbp を掛けると、点Poを回転軸とした右回転方向のトルクになりますが、θ と同じ左方向に回転させようとするトルクを正とすると、その2つのトルクには“-”が付きます。その和《バネによるトルク:『Tkf』 とします》は Tkf=-Lsp*θ*Kxs *Ksc*cos θs*Lsp -Lbp*θ*cos θbp*Ku*cos θbp*Lbp =-Lsp2*Kxs*cos θs*Ksc*θ -(Lbp*cos θbp)2*Ku*θ =-Kif *θ [kg*m2/sec2] (18) となります。ただし、 ↙#J |
*14 もしも左記のMfとMbの回転の角速度が、異なっているとすれば、何処かで間違っています。 本体上の2つの点の速度ベクトルに直角な線の交点がPoなのですから、もしも角速度が同じでなければ、車体の前の部分Mf と後部の部分Mb とは千切れてしまう事になります。 *14a Vx/Vs=Kxs の関係が有るとき、任意の時間:t1 から t2 まで VxとVsを積分した距離が、それぞれ X と(Lsp*θ)であるとすれば、 X=∫t1t2 Vx*dt=∫t1t2 Kxs*Vs*dt =Kxs*∫t1t2 Vs*dt=Kxs*(Lsp*θ) であるので、常に(Lsp*θ)のKxs倍が X です。 *14b 今バイクをブレーキを掛けないで直立させ、前輪サスペンションの上下方向のバネの強さ(Ks)が決められているとき、フロント・フォークの中の現物のバネの硬さ(Ksc)は如何なる値であるかを決めようとしています。 そのとき、前輪軸が外部(路面)に対して作用する力は真下方向の力だけです。その真下方向の力は、「フロント・フォーク方向のバネの力」と「その力と直角な力」とのベクトル的な合成力であると考えます。その後者「直角な力」は、原理的には【図22-f】のオイル・ダンパーのピストンと ピストンのシャフトとの2つの力《両者ともシャフト方向と直角方向の力》のモーメントによって発生します。 以上は「前輪軸が路面に対して作用する」表現にしましたが、本文では逆の表現にしています。 |
|||
| #J Kif=Lsp2*Kxs*cos θs*Ksc+(Lbp*cos θbp)2*Ku (19) = とします。 直線運動で「力」、「質量」、「距離」であったものが、回転運動ではそれぞれ「トルク」、「慣性モーメント」、「角度」に相当します。従って、角加速度 d2θ/dt2 に、この点Poを中心に回転する「慣性モーメント」: 《=『Imf』とします》 Imf=Mf *Lsp2+Mb*Lbp2 (20) =203.68+155.095=358.773 [kg*m2/rad] を掛けたものがこの回転体の慣性力《トルクの形》となり、その方向は角加速度と逆方向なので、 -Imf*d2θ/dt2 [kg*m2/sec2] となります。 次に、上述の「◉車体全体の上下振動」の最後で決めた、上下方向の制動係数 Rzs により、フロント・フォークの中のオイル・ダンパー自体の制動係数を決めます。 今、バネが Vx の速さで縮むと、そのダンパー自体の制動係数を『Rsc』とすると、フロント・フォーク方向の制動力は Rsc*Vx [kg*m/sec2] であり、この力 Rsc*Vx です。この力の値を、バネが縮む速さの真下方向成分: Vx*cos θca [m/sec]で割った値が、フロント・サスペンションに与えられた、上述の「真下方向の制動係数:Rzs」 でなければなりません。つまり、 (Rsc*Vx =Rsc/(cos θca)2=Rzs =986.21 [kg/sec] #K↗ |
#K ∴Rsc=Rzs*(cos θca)2 = となります。 リア・サスペンションのダンパーに関しては、決められた値: Rzu =741.46 [kg/sec] をそのまま制動係数の値とします。 故に、Poを中心に車体が dθ/dt の速さで左回転すると、フロント・フォークのダンパーの制動力,及びリア・ダンパー《→*15》の制動力は、それぞれフロント・フォークの斜め上方向,及び後輪の真下方向を正とすると【図22-c】により、それぞれ Lsp*(dθ/dt)*Kxs*Rsc Lbp*(dθ/dt)*cos θbp*Rzu となり、その力にそれぞれ cos θs*Lsp ,cos θbp*Lbp を掛けると、2つの右回転トルクになります。このトルクは θ が増加する方向とは逆方向であるので、制動トルクとなり その値を『Tdf』 とすると、2つのトルクに“-”の符号が付き、Tdf は Tdf=-Lsp*(dθ/dt)*Kxs*cos θs*Lsp*Rsc -Lbp*(dθ/dt)*cos2θbp*Lbp*Rzu 《→*16》 =-〔Lsp2*Kxs*cos θs*Rsc +(Lbp*cos θbp)2*Rzu〕 * (dθ/dt) 。 ←- Rdf=Lsp2*Kxs*cos θs*Rsc+(Lbp*cos θbp)2*Rzu (21) = とおくと Tdf=-Rdf *(dθ/dt) [kg*m2/sec2] 従って、以上の慣性力、制動力、バネの力以外に外力は無いとすれば《→*17》《両辺に“-1”を掛けています》 Imf *d2θ/dt2+Rdf *dθ/dt+Kif *θ = 0 (22) [kg*m2/sec2] 。 この微分方程式は、「◉車体全体の上下振動」の(a)式と同じな ↙#L |
*15 リア・ダンパーは多くの場合、【図22-d】の赤の螺旋の「バネ」の中に、斜め下に向かって付いています。しかし、後輪の車軸が上下に動く構造になっていますので、補正計算さえすれば このHPの様に真下方向に付いているのと等価です。 *16 cos2θ は (cos θ)2 のこと。ただし、後述の tan-1θ 等の“-1”に関してだけは例外で (tan θ)-1《=1/tan θ 》ではなく、 atn θ 《アーク・タンジェント θ 》のこと。これは数学の慣習。 *17 前輪ロックによって「ガクン」という極く短い時間での大きな力のやり取りは、t =0 の時点では既に終了していて、t =0 の時点から連立方程式で求められた Vx,Vy,Vs,Vu の速度で各点が動き始めます。 左記の本文で「以上の慣性力、制動力、バネの力以外に外力は無いとすれば」と有りますが、バネとダンパーは勿論 路面《外部》から「制動力」と「バネの力」と同じ力を受けます。上記3つの「力以外に外力は無い」というのは、この回転系の質量《Mf とMb》が「上記3つの力 以外の力を受けない」という意味です。 |
| #L ので、Mr,Rz,Kh の各係数と変数 Z を、それぞれ Imf,Rdf,Kif と θ に入れ替えれば良いのです。後述の「後輪ロックの場合」と区別して、α や w にもサフィックスとして“f ”を付けます。 また、t = 0 における θ も、上下動の場合の Z と同様 0 であるので、 (k)式により θ=C1f *ε-αf *t *sin(wf *t ) (23) =C1f *ε-αf *t *sin(2π*t/Ttf ) [rad] となります。ただし、C1f はこの時点では任意の定数、αf とwf は (e)式,(f)式の係数を入れ替え、 αf=Rdf/(2*Imf ) (24) = wf=SQR(4*Imf *Kif-Rdf 2 )/(2*Imf ) (25) = とし、オイル制動が無い場合の振動の周期をTtof とすれ ↗#M |
#M ば、係数を入れ替えた(n)式から Ttof=2π*SQR(Imf/Kif ) (26) = 振動の周期 Ttf は、係数を入れ替えた(m)式により Ttf=Ttof/SQR〔1-Rdf 2/(4*Imf *Kif )〕 (27) = (23)式の θ を時間 t で微分した値に 回転運動の半径:Lsp を掛けたものが、上述の計算《(6)~(17)式》で求めた、t=0 に於ける点Mf の速度 Vs であるので、前輪ロック直後(t=0)では、 (dθ/dt)*Lsp =C1f *〔-αf *1* sin 0+1*wf * cos 0〕*Lsp =C1f *wf * Lsp = Vs =0.997259 [m/sec] ∴C1f=Vs/wf /Lsp = ↙#N |
*18 この改訂版の前は、横倒しの力を計算するのにバネだけの力を計算していました。 |
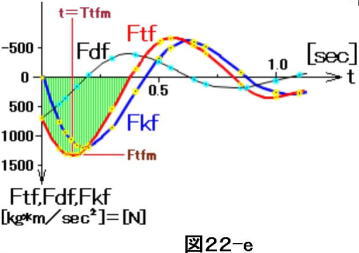
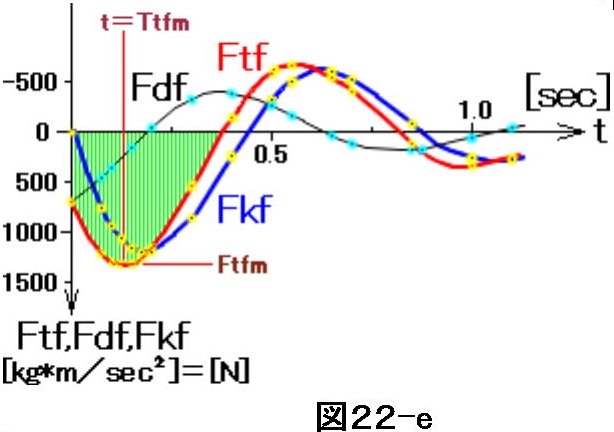
| #N ◉ライダー抛り投げ現象 初めての定義には『・・・』を使います。 徐行中フロント・ブレーキで急停車した場合、車体が受ける力はバネによる力だけではなく、オイル・ダンパーの力も受けます《↗*18》。 仮にフロント・フォークのバネを取り去って、その代わりに上からロープで車体の前部を浮かし、前輪を手でフロント・フォーク方向に急に動かすと、車体はその速度に比例した力をオイル・ダンパーから受けます。 しかし、通常はバネとダンパーの力を加算した力が出ています【図22-f 】。 フロント・フォークの中のバネによる力:『Fkf』と,ダンパーによる制動力:『Fdf』,及びその2つの力の和の力:『Ftf』は次の計算により求められます。 wf *t=St とおいて、(23)式から Fkf=Lsp*θ*Kxs*Ksc =Lsp*C1f *ε-αf *t *sin St *Kxs*Ksc (29) Fdf=Lsp*(dθ/dt)*Kxs*Rsc =Lsp*C1f *ε-αf *t *〔-αf *sin St+wf *cos St〕 *Kxs*Rsc (30) Ftf=Fkf+Fdf 。 【図22-e】(↘)のグラフは上記の計算の、それぞれの力の実際の値を示しています《停止前の徐行速度 V1=1 m/sec》。 |
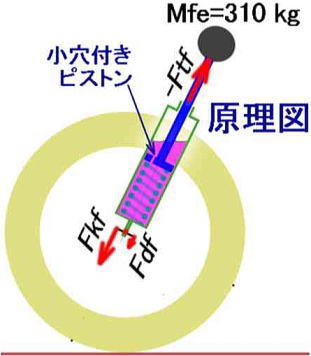 図22-f |
 図22-g |
| 次の小さな文字で書いた文と【図22-f】及び【図22-g】は、バイク全体の質量の慣性力の最大の時に、その慣性力をフロント・サスペンションとリア・サスペンションがどういう割合で分担しているか確認したもので、本論としては特に重要なことではありません。 この力:Ftf は図の赤線で示されていますが、図中の時間 t=Ttfm=0.1275 sec に最大となり、Ftfm=1329.81[kg*m/sec2] [N] =135.695[kgw] となります《サフィックスの“m”は最大値を意味します》《これは、ライダーの体重の2倍以上もの大きな力》。 この力:Ftfmに、回転中心Poからの半径 Lsp と cos θs を掛けたトルク:1333.41[N*m] が、車体全体を前のめり状態から押し戻そうとするフロント・フォークによる最大トルクになります。このトルクは、(23)式の θ を t で2回微分した角加速度の最大値『αsfm』《=-4.91449[rad/sec2]》に、上記全体の慣性モーメント Imf を掛けたトータルの最大慣性力トルク:1763.18[N*m] の75.625%を担っています《→*19》。 残りの24.375%の慣性力トルク:429.765[N*m] はリア・サスペンションのバネとダンパー【図22-g 】が担っています。そのとき、リア・サスペンションが出す力《【図22-g】の『Ftb 』》の最大値:Ftbm は真下方向に701.221[N] となりますが、【図22-c】のVu の方向が示す様に車体の後部は伸び上がっているので、リア・サスペンションは 重力とバランスしている状態からは「引っ張る」力を出しています《【図22-g 】とは逆向き》。 この小さな文字で書いた分の中の数値については上述の水色の訂正は行っていません。 前輪ロックの場合の慣性力の発生源の位置は【図22-c】のMf とMb であり、バイクは必ず左・右の重量バランスが取れているので、その図の奥行き方向の位置は、バイク本体の中心面内に在り、その力の方向《力のベクトルの矢》も勿論同じ中心面内《↘*19a》に在ります。 |
 この図では、上述の Ksc,Rsc に関する水色の数値の訂正を行っていません。右の注*19についても同様。 |
*19 Ftf が最大になる時間:Ttfm に於ける左記の角加速度の最大値:4.91449 [rad/sec2] に、点Mfの回転の半径 Lsp とフロント・フォークの縮みへの変換の係数 Kxs とを掛けると、フロント・フォーク方向の最大加速度『αxfm』 になりますが、その値は 4.2944 [m/sec2] です。左記のフロント・フォークの力の最大値:Ftfm と αxfm との比を『等価質量』《Ftfm/αxfm=『Mfe』》とすればその値は309.66[kg]となります。 その「等価質量」Mfe と,フロント・フォークのバネの硬さKs ,制動係数Rzs とから構成される、【図22-f】の車体前部の振動系の周期を、上下動の場合の周期の計算式(m)を使って計算すると、Tt=0.871477[sec]となり、その値は車体全体の回転減衰振動の値:(27)式の周期 Ttf と一致します。 同様に t=Ttfm のとき、点Mbの真上方向の力と加速度との比から計算された「等価質量」:『Mbe』は、【図22-g】の様に232.81[kg]となりますが、この「等価質量」と,リア・サスペンションの係数:Ku,Rzu とによって計算された振動の周期も0.871477[sec]となって、前輪ロックの場合の系全体の周期と同じです。 Mfe や Mbe が実際の重量よりも大きい値になっているのは、次の理由です。 車体を押し返すのに最も効率の良いのは【図22-c】のVs やVu の方向に力を加えることなのですが、フロントとリアのサスぺンションはやや不利な方向に力を出している等の理由からです。 |
| ここで、前輪に対して上記慣性力が作用する点《慣性力を前輪が受ける点》について確認します。 フロント・フォークが【図22-h 】の様に2本の単純な棒ならば、本体中心面上に発生する慣性力をFi とすると、Fi は力の作用点A点と2本の棒と間の距離《図の水平距離》に対応した値で2本の棒に割り振られ、その異なる大きさの2つの力がを図の下の方の連結部で合成され、【図22-h 】のバイク本体中心面上の点Bに、力Fi として伝わります。 ということは「A点に加わった力:Fi はその力の延長線(力の作用線)上の点Bにそのまま伝わった」ことになります《→*19b》。この当たり前のことが【図22-i】のサスペンション・ユニットに関しては、上記“力の割り振り”が不可能になっています。 何故ならば、図中のA点に力:Fi が加わっても 2つのサスペンション・ユニットは全く同じ伸び・縮みをしているので、同じバネの力と同じオイルの粘性力で2等分されてしまうからです。従って、単純に考えれば2つのユニットの中心位置の力しか伝えない事になってしまいます。 しかし、上記力Fi の、2つに等分された力の反作用として2つのピストンがシリンダー(筒)から何らかの互いに等しい力《Fd/2 とします》 を受けると、当然 その合力として図の様に中間位置にFd が発生してフロント・フォークの上部を支えます。すると、その位置(中間の点)を中心に、力:Fi によってフロント・フォークの上部を右回転させようとするモーメントが発生します《その値は Fi *La》。 そのモーメントは図の様にピストンのシャフト《図のFt 位置》と、ピストンの側面《図の-Ft 位置》とを通じてシリンダーに伝えられ、図のシリンダーの下の位置にFt1 と-Ft1 の力によって右回転させようとするモーメントなります。 そのモーメントによるFt1 と-Ft1 の力と、同じ位置(図の同じ高さ)に於けるFi が等分された2つの力Fi/2 と計4つの力の合力がB点に於けるFi となり、これで当たり前の事がやっと成立したことになります《左側の2つの力(Fi/2と-Ft1 )は打ち消し合って小さくなっています》。 この力:Fi の発生源はMf とMb の慣性力なので、その力が伝わった点Bは、上記の様にバイク本体の中心面に在ります。一方、前輪のタイヤ幅とハンドルを25°切ったときの前輪の傾き等を考慮して、「●数値解析(改訂版)の右の「*↑」で計算した様に、徐行速度が1m/secのときのバンク角を考慮し、C点はバイク中心面から30.939mm(Lcc)だけ右に逸れた位置に在ります《↘*20》。 上述の様に、Mf とMb を発生源とする慣性力トルクの内、その75.625%《【図22-e】の左の小さな文字の計算》がフロント・フォーク下部のB点に慣性力として伝わった訳ですが、その力の大きさは上述の様に Ftfm=1329.81[kg*m/sec2] (最大値)です。この力は【図21-a】の様に鉛直線からはキャスター角θca(=26°)だけ斜めになっているので、その力の鉛直方向成分の値は Ftfm*cos θca =1195.2[N] となり、その力の作用点を含んでいる“バイク中心面”から、タイヤの接地点Cは上述の30.939mmだけずれているので、 Ftfm*cosθca*30.939/1000 [N*m] の、真後ろから見て左回転モーメントが発生します。 つまり、ハンドルを向けた方(左)に車体を倒そうとするモーメントが発生した事になります。 このモーメントは、『総重心Mrの路面からの高さ:Lg』 《=0.68m=680mm》に於いても同じ値なので、総重心Mr位置での横方向の力:『最大横倒し力:Fsdfm 』は Fsdfm =Ftfm*cosθca*30.939/680 =54.381[N]=5.5491[kgw] となります。上記フロント・フォークの力:Ftfm をこのFsdfm に換える比率を『横倒し係数:Kfd』とすると |
*19a バイクを横から見たとき、2つの連結された塊MfとMbは点Poを中心としたそれぞれの円周上を動きます【図22-c】。ということは、2つの塊の加・減速の方向はその円周の接線方向であり、その慣性力の方向もバイク本体中心面内に在ります。従って、ロックする瞬間に、フロント・フォークに対しては、フロント・フォーク方向の力
およびフロント・フォークに直角な方向の力が発生します。そのうちフロント・フォーク方向の力は、今まで解析した“車体の真横から見てフロント・フォーク方向の”運動量保存と、全体の運動エネルギー保存に因る【図22-c】に示された回転運動となり、この解析により本体中心面内の“動き”の解析は済んだことになります。 では、“フロント・フォークと直角な面《ハンドル回転軸と直角な面》内”の運動はどうなるか考えます。 前輪ロックの場合に【図22-c】のMfとMbの「フロント・フォークと直角方向」の運動量は、ロック前は Mr*V1*sin θca=105.209 [kg*m/sec] であったものが、ロック後は Mf*Vs*sin θs+Mb*Vu*sin θu=-25.393 [kg*m/sec] になったので、その運動量の差だけMfとMbはフロント・フォークから「フロント・フォークと直角方向」《斜め下方》の瞬間的に極めて大きな力《時間で積分した力積》を受けたことになり、逆にフロント・フォークはMfとMbから力を受けた事になるので、その力はハンドルの回転軸の延長点から見て前輪接地点Cの周りの動きになっても良い筈です。しかし、路面に押し付けられている点Cの左側に在るフロント・フォークが、ハンドル回転軸の延長 ↗**へ |
*19b 下の【図22-h】の0.1とか0.9の数字と、力の大きさを示す赤い線の長さは正確ではありません。 **(左の注の続き) 点から見て前に《V1の方向に》動くという事は、前輪が角度を変えなければならない事になり、前輪タイヤのC点の周りのタイヤ面の摩擦がそれを止めるので、点Cの周りの回転運動は起きません。 バイク本体中心面内に於いてフロント・フォーク方向の運動エネルギーは保存されるのは、その方向の運動に対してMfとMbはバネとダンパーで言わば「浮いている」からです。しかし、上記の回転運動に対しては、フロント・フォークが上記タイヤ面の摩擦(クーロン摩擦)で点Cを中心に回転できず、地面に固定されているので、フロント・フォーク方向と直角な面のMf,Mbの運動に対しては地面に固定されているからです。 もしも、接地点Cの周りの摩擦が無い場合には、Mrの 大きな慣性力の フロント・フォークと直角方向成分に因って、前輪と本体中心面とがなす角度が25°よりも狭くなる方向に、前輪接地点Cを中心に前輪が しかしその現象が起きる為には、点Cの周りが車重のほゞ半分の力で押さえ付けられている摩擦に打ち勝って回転しなければならないので、実際にはその現象は観測されません。 |
|||
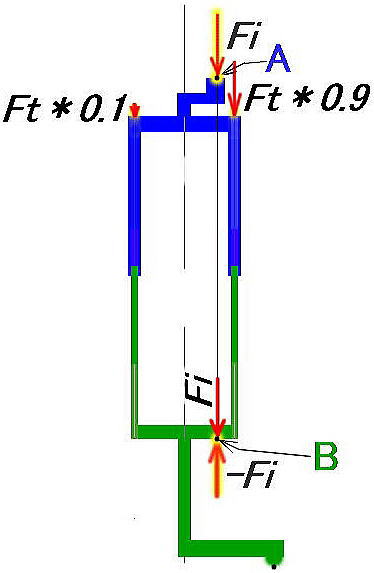 図22-h |
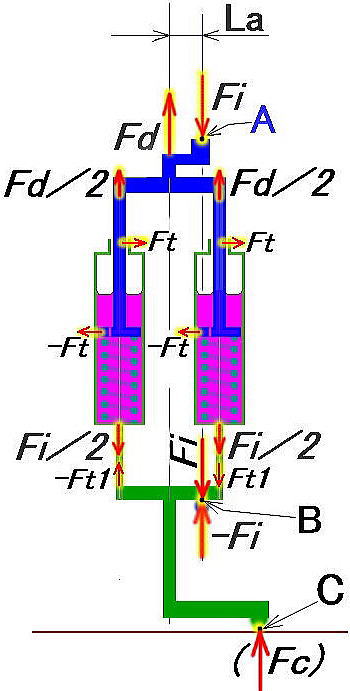 図22-i |
| Kfd=cos θca*30.939/680=0.040894 Fsdfm=Ftfm*Kfd 。 上記の様に、5.5[kgw] もの大きい力でライダーの膝小僧の辺りを真横から押された事になります。 その横倒しの力が悪い作用をするのは【図22-e】のハッチング部分の、フロント・フォークの出す力が正の時間帯 ↙ |
*20 今回の改定の前は、左記の本体中心面から右に逸れた距離として、ホンダ「ホーネット」の仕様の「トレール量:99mm」 ,キャスター角26°と、ハンドルの回転角25°から、 99*cos26°*sin25°≒37.6mm で計算していましたが、左記の30.939mm は1m/secの徐行速度のバンク角とタイヤの太さ考慮して計算したものです。 |
||||
| だけですが、徐行スピードが1m/secのとき停止した直後に残った重力の横倒し成分の方が、フロント・フォークに因る横倒し力(Fsdfm)よりも大きい事が後の計算の結果、分りました。 従って重力を含めた横倒し力の効果は、後述の「◉前・後輪ロックの場合の比較」の項で前輪ロックと後輪ロックの場合とを纏めて計算し、比較します《→*21》。 いま、シートに座る位置をPs とし、線分PsPoの長さをLso とすると、【図22-d】での比例計算と、その後の改造でシート高を約2cm 低くし、座る位置も 2cm くらい後ろにずらしたので、Lsoは Lso=SQR[(0.819-Lsp*cos θsp)2+(Lpv+0.027)2] =SQR[0.2222+1.09012] =1.1125 [m] 。 線分PsPoが鉛直線《真上方向》となす角度を θso とすると θso = atn(0.222/1.0901)= 従って、t =0 のときライダーが座っている座面は、上記車体全体の角速度ω の回転により斜め上方向に ω*Lso=0.81789*1.1125=0.9099 [m/sec] のスピードで進みます。この速度の大きさは前輪ロック前の徐行速度V1(=1[m/sec] )に近い速度なので問題ないのですが、その速度の真上方向成分はライダーの、真上方向への『抛り上げ速度:Vaf』となり、その最大値は( t=0 の直後) Vafm=ω*Lso*sin θso =0.18158 [m/sec] ≒18[cm/sec] という大きな値になります。この値は、右の《*21a》で計算したフロント・フォークに因る横倒し力で生じた、Mr位置での横倒れ速度:7.1[cm/sec]《重力の影響は未計算》を遥かに上回る、2.6倍もの速度です。 この抛り上げ速度は t=0 の直後が最も大きく、シートの高さは【図22-e】の青線のFkf と同じ時間パターンをしています《ただし、同図はフロント・フォークが沈む動きを示したグラフなのですが、リアシートは t=0 の直後から逆に上がり始めます》。 上記18 [cm/sec] の速度は同図のFdfを見ると凡そ t=0.2 [sec] で 速度 0 [cm/sec] に減速しているので、この加 速度は、約-18/0.2=-90 [cm/sec2] の加速度であり、重力 #O↗ |
*21a 上述の前輪のバネとダンパーとに因って路面を蹴る力:Ftfの効果を計算するには、短い時間:⊿t に、そのときの力Ftf を掛けた Ftf*⊿t 、つまり【図22-e】の様に縦に細く切り分けた“力積”を次々に加算していき、力Ftf が負になったら加算をストップします。最後の時間を次の“Time” で示し、加算した結果を“FTif”で示します。3つの細かさの⊿t で計算してみました。 ⊿t [sec] FTif [N・sec] 0.05 323.87 (Time=0.35sec) 0.01 339.26 (Time=0.37sec) 0.002 342.14 (Time=0.376sec) この t=0.376sec迄に得られた力積から計算した総重心Mr位置での、フロント・フォークに因る『横倒れ速度:Vsdf』は Vsdf=342.14*Kfd/Mr =0.070848[m/sec]≒7.1[cm/sec] となります《ただし、接地点Cがバイク中心面から逸れた距離(Lcc)を、改訂前の37.6mmとして Kfd を計算しています》。 |
*21 後述の「◉前・後輪ロックの場合の比較」の項を含め、【図22-e】以降の図では、上述の Ksc,Rsc に関する水色の数値の訂正は行っていないので、数値によっては1割程度値が異なるものが有ります。しかし、この頁では「前輪でロックした場合と後輪でロックした場合とで転倒の可能性に殆ど変わりが無い」という事に主眼が在りますので、当面、次頁(最後の頁)でのみ、訂正した数値で計算・作図をします。 *22 今までの解析では「ロックする前の総運動エネルギーが、ロック直後の全運動エネルギー: Mf/2*Vs2+Mb/2*Vu2 に等しい」としてきました《 (16)式の下の(α)式がそれです》。 では、「横倒しの運動エネルギーは何処から来たのだ」と御指摘なさるかもしれません。 しかし、その(α)式は、ブレーキがロックした「直後」の状態の、言わば「車体全体の回転減衰振動」の初期状態を規定している式なので間違いではありません。横倒れの最大速度を得るのはその後の、半周期弱の時間を掛けて得られるのです。上記*21aの“Time”0.376secにおける横倒れの運動エネルギーの大きさは Mr/2*Vsdf2=0.60233[ N*m] =Etoの0.502% に過ぎませんが、バイク全体から見ると、自身の運動エネルギーの極く一部がフロント・フォークの働きによって横倒しの運動エネルギーとして保存された事になります。 また、左記の本文の中で“横倒れ速度の加速”と“シートが上がる”のが「同時進行」としているのは、前者と後者の時間パターンが【図22-e】の それぞれFtfと Fkfの時間パターンであるので、両者の時間パターンが似ているからです。 |
|||
| #O の加速度:-980 [cm/sec2] よりも充分小さいので、上記「抛り上げ速度」でライダーが上昇し続けるという事は有りませんが、ライダーを慌てさせます。 そのシートが上昇する高さを求める為に、上述の「回転軸」Poを中心にした回転角 θ の最大角:『θmf』を求めます。θ が最大になるときは、θ を微分した(30)式の〔・・・・・・〕の中がゼロになるときです。そのときには St=atn(wf /αf) =1.35277 [rad] t=St/wf =0.18821 [sec] 。 故に、(23)式から θmf=C1f *ε-αf *t * sin St=0.082328 [rad]=4.7170° となるので、『ライダー放り上げ高さ:Lyf』は【図22-c】により Lyf=Lso*〔cos(θso-θmf )-cos θso〕 =0.0146 [m] ≒1.5 [cm] となります。この僅か1.5cm とは言え、上記横倒れ速度が7.1[cm/sec] 以上になろうとしていて、転びそうになった方の足を急いで踏ん張らなければならないときに、 ↙#P |
| #P “横倒れ速度の加速”と同時進行で“シートが1.5cmも上がる”という事は、本来「御主人様」であるライダーを「横の斜め上に放り投げる」に等しい現象です《↗*22》。 更にライダーが、倒れそうな方の足を踏ん張ろうとして腰を浮かしたとき、その人の体重がヘルメット等を合わせて60kgであったとすると、前・後輪 合わせたサスペンションのバネが2cm《→*23》伸び、上記の放り投げ高さの約1.5cmと合わせると4cm近くも急に座面が高くなってしまいます。 脚の長い人ならいざ知らず、一般にシートが4cmも高くなると それだけで、「足着き性」が悪くなって、ちょっとバランスを崩しただけで踏ん張る事が出来ず倒れてしまいがちですが、そのときにはバイクが倒れかかっている勢いが有るので特に深刻です。 以上の現象を総括的に述べると、前輪ロック前の総質量Mr:240kg の進行方向の“運動エネルギー”が、前輪ロック後のMf とMb のそれぞれの方向(Vs とVu )の運動エネルギーとなり、それ等の速度により車体が前屈みになってシートが浮き上がり、それと同時にフロント・フォークのバネとダンパーの力によって横倒しの運動エネルギーが発生したと言えます《→*24》。 その最も目立つ動きである車体前部:Mf の動きは、【図22-c】のVs の方向の、上記最大振れ角 θmf [rad]に 回転の半径Lsp を掛けた距離であり、その大きさは(斜め下方向)10.0cmにもなります。 その沈み込み深さの時間変化は、【図22-e】のFkf のパターンと同じです。一方横倒しの加速度の時間変化は同図のFtf と同じです。この両者の時間変化はライダーには全く区別が付かず、ライダーは「フロント・フォークが沈み込む勢いで倒れてしまった」という感覚を受ける訳です。 その「横倒しの運動エネルギー」は、ライダーが倒れそうな方の足を踏ん張らない限り、「減衰」する様な事はなく倒れ続けます《→*25》。 ↗ |
*23 前・後合わせたバネの硬さを 240kgw/80mm としているので、60kgwの体重の人が腰を浮かすと 80[mm]/240[kgw] * 60[kgw]=20[mm] の高さだけシートが浮き上がって来ます。 特に左右に傾斜が付いていて、下りの方に倒れかかると僅かながら足が地面に着くのが遅れ、その間に重力によって倒れる速度が加速されてしまうので、それを止めるにはバイクを引き起こす力よりも大きな力が必要になってしまいます。 |
*24 「ロック前の全運動エネルギー」Eto は、ロック直後は一旦全て上述のPoを回転軸にした回転振動の運動エネルギーになりますが、最終的には主に制動オイルの温度上昇と横倒しの運動エネルギーになります。 ただし、ブレーキを「ジワーッ」と掛けた場合には、そのブレーキの温度が上がりますが、今まで解析した様に、瞬間的に停止させてしまった場合にはブレーキの温度上昇は原理的には有りません。 *25 【図22-e】のFtfが負の値になる時間帯も有りますが、その時間帯でもFtfが正の時間帯に加速されたMrの慣性力と、後述する重力とによって倒れ続け、何もしないと倒れてしまいます。 |
| TOP | ●この頁のTop 数値解析(改訂版) 前輪ロック 車体全体の回転減衰振動 ライダー抛り投げ現象 立ち転けの共通原因 後輪ロックの場合の現象 車体全体の減衰振動 前・後輪ロックの比較 停車時転倒の予防策 ライダー抛り投げ軽減策《??》 足つき性とハンドルの改善 引き起こしの力 完全転倒からの引き起こし |
計算の楽しさと重心の算定 |
◉立ち転けの共通原因 私は今迄、次の4種類の場所で停止したとき、転倒してしまいました。①「見通しの悪い、狭い三叉路」《これだけは平地》、②左側が「下り傾斜になっている駐輪場」、③傾斜の有る「T 字路」、④退き返そうとした「坂道」で、そのいずれもハンドルを切っている方向に倒れました《左右に傾斜が付いている所で倒れたのは全て足が踏ん張れない谷側に倒れました》。これは偶然の一致ではなく、上述の様な、ハンドルを切っている方向に「抛り投げられる」というメカニズムだったのです。 ①恥ずかしながら、私は「見通しの悪い、狭い三叉路」で2回も右側に転倒しましたが、それは同じ場所でした。2回とも右側から他車が急に現れた状況も一致しているので、これは「偶々バランスを崩した」のではありません。その「三叉路」は鋭角の三叉路だったので、ハンドルを大きく右に切っていたのです。 ②このページの冒頭「ブレーキと立ちごけ」のところで述べた左が谷側になっている駐輪場で、「山側に重心移動しよう」として左ハンドルを切ってから停止するというのは間違ったことではありません。何故ならば直立状態で直進しているとき左ハンドルを切ると車体の下部が左に移動するけれど、重心は直進しようとするので車体を山側(右)に傾ける事が出来るからです。 しかし、狭い駐輪場では左ハンドルで曲がって直ぐに停車しなければならないので、ハンドルを切っているときの長年のバランス感覚により“左バンク状態”《重心Mrが左の谷側に在る状態》のまま停車してしまい、谷側に「抛り投げられる」ことになるのです。 ③ホテルの駐車場を出て直ぐ右に、右側が下り坂になっている三叉路が有り、駐車場から出たばかりだったので、まだハンドルは右(下り方向)を向いていた状態で停止したところ、右に倒れてしまいました。その三叉路の路面も右傾斜になっていたので、踏ん張るのが間に合わなかったのです。 ④「坂道」については、道幅が余り広くない上り道を退き帰そうとして、一旦道路右端に、道路と直角に停止したのですが、そのときハンドルは大きく、右の下り方向に向いていたので下り方向に倒れてしまいました。 #Q↗ |
#Q 以上の転倒例では例外なく、上述の“横倒し力”等の全ての計算が当てはまります。この、今まで解析してきた停止前の速度:「V1」が更に大きくなった場合には、例えば2倍の 2[m/sec]になると、横倒し力やライダー放り上げ高さはほゞV1に比例するのでほゞ2倍になり《→*25a》、倒れる速度もほゞ2倍になってその運動エネルギーはほゞ4倍になってしまいます。従って、倒すまいとする力と耐えなければならない時間も、例えばそれぞれほゞ2倍になってしまいます。 加えて、ハンドル角25°でその様なスピード(2[m/sec])でカーブを曲がっているときには遠心力に因るバンク角の問題も大きくなります。もしも、そのスピードの場合には後述《*34》の計算でバンク角 δ は6.8802°となり、カーブの曲率半径は3.3827[m]になります。そのカーブを足を着かずに曲がっていたときには、総重心Mr の位置に発生していた遠心力は (22/3.3829[m/sec2])*240[kg] =283.78[kg*m/sec2] =29.0[kgw] の大きさとなっているので《バンク角は6.88°》、自転車等の飛び出しで急停車すると、途端に遠心力だけがゼロになってしまいます《→*26》。ということは、傾いているバイクに残った重力の横倒し方向の成分によって 240[kgw]*sin 6.88° =29.0[kgw] もの大きな力《ライダーの体重の凡そ半分の重力》で横から、総重心位置を押された事になり、確実に押し倒されてしまいます。 鋭角のカーブを曲がっているとき、突然停車すると遠心力が無くなって倒れてしまうというのは、前輪ブレーキで停車しても、後輪ブレーキで停車しても、大きく変わる事はありません。しかし、正確な数値比較の為、後輪ブレーキで停止した場合はどうなのか、計算してみました。 ↙#R |
*25a V1が2倍になると「横倒し力」が2倍になるというのは正確ではありません。「横倒し力」がV1 に比例するのは徐行時のバンク角 δ が一定の場合《従ってこのページ冒頭の図の注*↑で計算した前輪接地点Cの本体中心面からのずれ:Lccが一定の場合》ですが、V1 が変わると Lcc が次の様に変化します。 V1 Lcc Lyf 0.5 32.175 0.0082 1.0 30.939 0.0146 1.5 28.891 0.0190 従って「横倒し力」は「V1に比例する」よりも少な目に変化します。 同様に「ライダー放り投げ高さ」:Lyf の計算式の中には上述の様に cos の三角関数が入っているので、上の表の様に「V1に比例する」よりも少な目に変化します。 それよりも大きく変化するのは重力に因る影響です。これは、バンク角 δ がV1の2乗に比例するので、重力に因る「横倒し力」がV1の2乗に比例してしまうからです《 δ[rad] ≪1 のとき》。 *26 教習所の教官クラスの人でないと、そんな急カーブを、足を着かずにそんなスピードで曲がる事は出来ませんが、仮に両足の爪先を着いてバランスを取りながら曲がっても、急停車すると確実に転んでしまうでしょう。 何故ならば、爪先の小さな力でバランスを取りながらそのスピードで曲がっている状態でも、遠心力と重力による横倒し力は左記の計算例の様に、共に「爪先の力《0.5kgw程度以下》に比べて大きな値《29.0[kgw] 》であるので、その2つの力のバランスを取りながら曲がっている状態である事に変わりがないからです。 |
| #R ◉後輪ロックの場合の現象 |
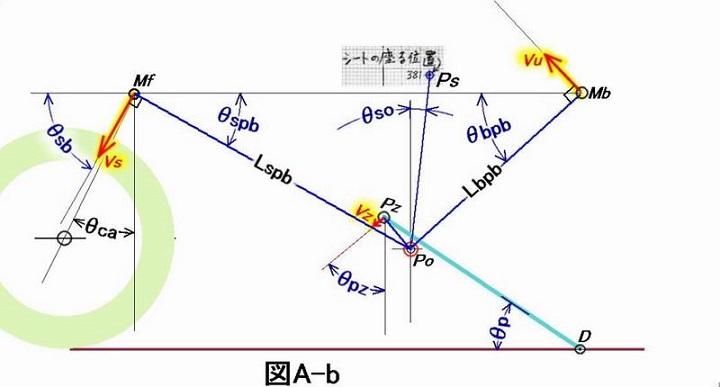
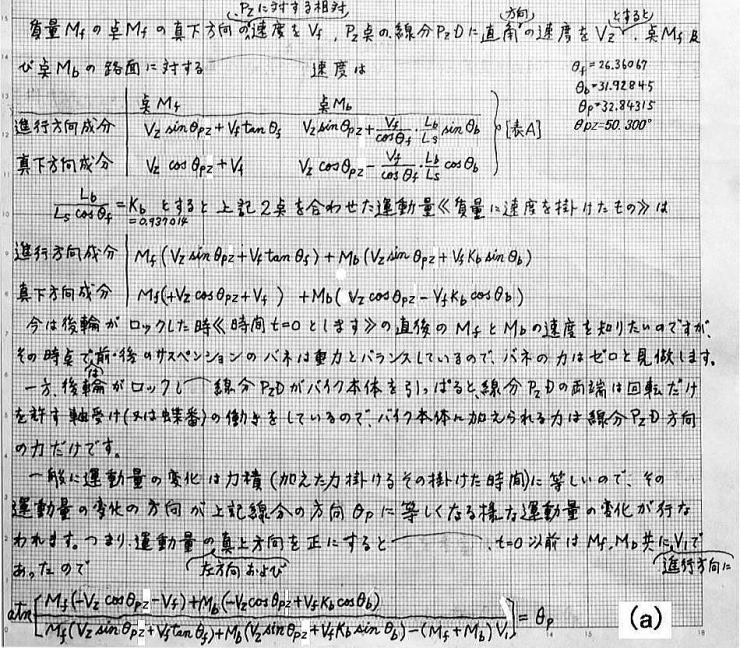
| 後輪ブレーキは【図22-d】の緑色に塗った「スウィング・アーム」に取り付けられているので、後輪がロックした“瞬間”には 後輪とスウィング・アームとが「一体の物」となり、現実には存在しない図中の「フック」に引っかかったのに“近い”状態になります。 しかし後輪がロックした後《 t=0 以降》、実際にはフロント・フォークが縮む等して後輪がスウィング・アームと一体になったまま路面を少しだけ転がるので、図中のピボット『Pz』と転がり移動した接地点Dとを結ぶ線分PzDは、上記「フック」が在る場合よりも多く斜め前に進みます。 【図A-a】の様にPzDが路面となす角度を『θp』とし、後輪がロックした後 線分PzDが反時計方向に微小角だけ回転したとき、点Pzが、転がりながら移動した線分PzDに対して相対的に直角方向の斜め下に『⊿Z1』だけ移動したとします。すると、転がりながら移動した線分PzDの水平方向の距離は⊿Z1*sin θp だけ長くなります。 【図22-d】の寸法比によると、線分PzDの長さに対する後輪タイヤの半径の比率:『Kr』は0.46964です。PzDが上記微小角だけ回転すると、後輪も同じ角度だけ回転して路面を転がり、車軸は水平の前方に⊿Z1*Kr だけ移動します。ということは車軸の真下に在る接地点Dも同じ距離だけ移動するので PzD全体が回転しながら前進し、Pzは、路面に対して水平方向に 上記PzDの水平方向の距離の変化とD点の移動距離とを加算した ⊿Z1*sin θp+⊿Z1*Kr=⊿Z1*(sin θp+Kr) だけ前進します。 またPzは、上記PzDの回転によって、真下方向には ⊿Z1*cos θp だけ移動するので、Pzは【図A-b】の様に、真下方向となす次の角度:『θpz』の方向に動きます。その角度の値は θpz=tan-1[⊿Z1*(sin θp+Kr)/(⊿Z1*cos θp)] =tan-1[(sin θp+Kr)/(cos θp)] =50.300° 。 |
 |
||||
| 【図A-a】の座標から Ls=SQR(6742+3342)=752.22 Lb=SQR(5362+3342)=631.55 θf,θb,θp についても同様。 |
*27 ロック直後はまだバネは伸び縮みする前である為、直進走行のときと同じバランス状態であり、サスペンションのバネの力はゼロです。オイル・ダンプの制動力についても、確かに瞬間的に大きくなって直ぐに力を出しますが、その力はロックした瞬間の極く短い時間では運動量の変化をもたらす事はありません。今、問題にしているのは、瞬間的に運動量を変化させてしまう様な、「ガクン!」という、極めて短時間の、極く大きい力を取り上げています。 | ||||
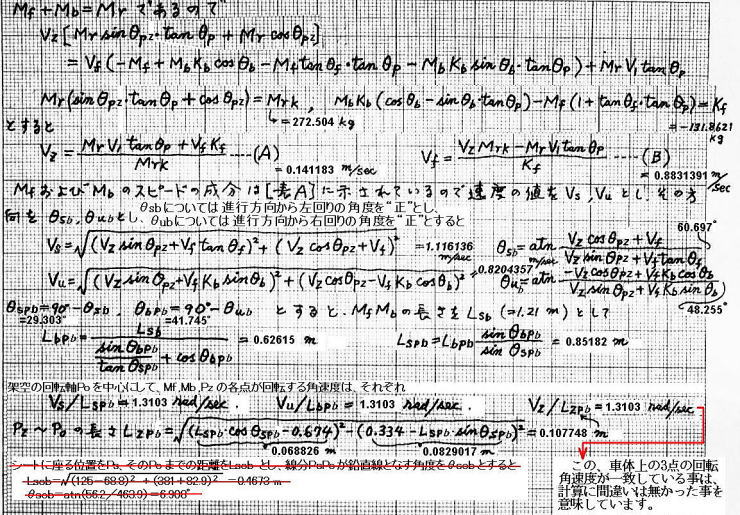
| 次に、後輪がロックした直後の時間( t = 0 )に於けるPzの対路面速度を【図A-b】の様に『Vz』 とし《「対路面速度」と言っても水平速度ではなく、図に示す方向の速度》、更にMf の、Pzに対する相対速度の真下方向の成分を【図A-a】の様に『Vf』 とします。 また、角度 θf,θb を【図A-a】の様にとり、線分の長さ Ls,Lb を同図の様にとります。 後輪ロック後は上記の様に後輪は僅かに路面を転がって前進しますが、以下、ロック直後:t=0 のときの Vz や Vf を、連立方程式を解く手法で計算します。 ピボットPzは、蝶番の様に動くのでPzDは伸び縮みしない紐と同じ働きをし、ライダーを含む車体が受ける力は、Pz を通して線分PzDの方向の力しか受けません《↗*27》。 従って、後輪ロック前・後の運動量の変化の方向が線分PzDの方向と一致している必要があるので、【図B】の(a)式が成立していなくてはならず、従ってその式を Vz とVf について整理した【図C】の(A),(B)の2式が成立しなければなりません《2つの式は、“Vz=・・・”の形にするか、“Vf=・・・”の形にするかの違いであって、共に(a)式を変形したもの》。 実際の計算では先ず最初に、【図C】の中の Kf や Mrk などの定数を数値計算しておき、(A)式と(B)式の右辺の中の Vf,Vzに、例えばそれぞれ0.9,0.13等、大まかな予想の値を代入して、(A)、(B)式でより正確な Vf,Vzを求め、その値を使ってMf ,Mbの対路面スピード《それぞれ Vs,Vu とします》を次の式で計算します《Kb,Mrk,Kf や式の誘導など詳しくは手書きの文章に書いて有ります》。 Vs=SQR[(Vz*sin θpz+Vf *tan θf )2 +(Vz*cos θpz+Vf ) 2] Vu=SQR[(Vz*sin θpz+Vf *Kb*sin θb)2 +(Vz*cos θpz-Vf *Kb*cos θb)2] 。 この、速度 Vs で動くMf の、後輪ロック後の運動エネルギーを Emf とし、速度 Vuで動くMb のそれを Emb とすると、その2つの運動エネルギーの和《 Et とします》 |
→ 図B |
 |
|||
| は Et=Emf+Emb=Mf/2 *Vs2+Mb/2*Vu2 となりますが、後輪ロックの前・後の運動エネルギーは不変なので、本来は Et=Mr/2 *V12 (C) が成立していなくてはなりません。 ここで、(C)式の左辺は最終的には右辺の値にならなければいけないけれど、現段階ではどの位違っているのかという比率《これを Kvcとします》: Kvc=(Mr/2 *V12)/(Et) を計算し、この Kvcを使って、Vf とVz に次の様な「補正」を行います。 Vf=Vf *Kvc0.5 ,Vz=Vz *Kvc0.5 。 この2つの「等式」《Vf=Vf *Kvc0.5,・・・》は数学的には在り得ない「式」ですが、その右辺の中のVf,Vz は補正前の値で、左辺のVf,Vz は補正後の新しいVf,Vz の値に入れ替えたものです。これは「BASIC」プログラムでよく使われる命令です。 この補正を施されたVf,Vzを(A),(B)式の右辺の中のVf,Vzに代入して更に正確なVf,Vz,Vs,Vu ,Et の値を求め、上記「補正」も含めた演算を繰り返します《4回目の演算からVs の上5桁は全く同じになります》。 この様にして、式(A),(B)と上記(C)の3式から成る連立方程式を解きます《↘*28,*29》。 【図A-a,b】の下の手書きの計算(【図B】,【図C】)は、このHPの読者が「本当にこの計算で良いのか」という事を確かめる為のお役に立つのではないかと思って載せておきました《この本文と重複している部分が有ります》。 上記「連立方程式」の計算は、数回程度の、繰り返し演算で上記全ての数値は収斂しますが、1回の演算はポケット・コンピュータの「C」,「.」,「Enter」の3っつのキーを各1回押すだけです。 「方程式」の定義によると、方程式は「式の中の文字が、或る特定の値《「時間などの特定の関数を含む」と解 ↙ |
 |
||||
| 図C 本文の中ではPzの動きから θpz を計算しましたが、Pzの位置から計算すると【図C】の中の値から θpz=tan-1(0.0829017/0.068826)=50.300°となり、本文の計算と一致します。 |
|||||
| 釈されます》のときだけ成り立つ等式」のことであり、その「特定の数値《または時間などの特定の関数》」を「解」と言っているのですから、その解に至る計算の仕方が勘に頼っていたり、非数学的であっても、「方程式」を満足しさえすれば「解は解」なのです《ただしこの「解」はあくまで「近似的な手法による解」であるので、「厳密な数学上の解」でないのかもしれませんが、それはバイク転倒の究明には関係のない問題です》。 上記方程式の解によってMf,Mb,Pz の t=0 に於けるそれぞれの速度の大きさとその角度: Vs=1.116137 [m/sec],θsb=60.697° Vu=0.820436 [m/sec],θub=48.255° Vz=0.141182 [m/sec] が求められました。ただし、後輪ロック前の徐行速度:V1=1.0 [m/sec] のとき。 |
*28 普通、連立方程式を解く場合には、例えば手書きの「(A)式のVzを(B)式の中のVz に代入してVz を『消去』し、最終的に(C)式《手書きではない本文》のEt
もVf で表して未知数をVf 一つに絞り、そのVf についての方程式を解いてVf の値を求める」というのが常道でした。 しかし、これは不可能な場合も有り、可能だとしても実に骨が折れ、途中で間違えたりします。 私が愛用している、徐々に正確な値を求めていく手法では、上記(本文)の様に、式を変形せず、そのまま式の演算を繰り返すだけで、正確な「解」に収斂します《プログラム例は次ページ「計算の楽しみと重心の算定」の「アインシュタイン」の上の所に「重心計算」として載せておきました》。 これは、未知数を上記のVf の様に1つに絞らず、一つの式で求められた《より真値に近づいた》新しい数値を、次の式の中の古い数値と入れ替える操作を繰り返して行けば、3つの式の中の全ての数値がより精度良くなり、方程式がより“精度良く”成立する訳です。 続き ↗* |
* 左記のVf,Vz 等を求める計算では、更にもう一つの手口を使います。 連立方程式の中の1つの式(C) に付いては、式を変形するのが大変なので、計算の元になっているVf とVz に左記の「補正」を加えようという訳です。その「補正」の式の「0.5」 の意味は、速度は運動エネルギーの平方根に比例するので、(C)式の左辺と右辺の「運動エネルギーに或る比率の違いが有るとすれば、その元になる速度には、運動エネルギーの違いの比率の平方根倍だけ修正すれば良い“だろう”」という発想です。 実際には、0.3でも、1.0でも収斂するという、かなりアバウトなものですが、0.7が早く収斂し、Vf とVz の仮入力値を左記の様にそれぞれ0.9と0.13にした場合、Vsの上5桁が同じになるのに僅か2回の演算でOKです。 そのVf,Vz が収斂すると、その過程で計算してきたVs,Vuも収斂しているので、知りたい未知数が一挙に1セットで出てきます。 この様に、その場の状況で臨機応変に解き方を変えても、未知数が収斂すれば良いのです。 *29 上述した様に(B)式も(A)式も(a)式を変形したものなので、厳密には(a)式と手書きでない(C)式の「2式からなる連立方程式」と言うべきかもしれません。しかし、「解」が収斂するのに役に立っている筈なので、式は少し多めに有った方が良い様です。 |
| ◉車体全体の回転減衰振動(後輪ロック時) |
| 次に点Mf及びMbから、ベクトルVs 及びVu のそれぞれに直角な線 《【図A-b】の濃い青い線》を引いたとき 2本の線の交点をPoとし、線分MfPo 及びMbPo の長さを Lspb,Lbpb とすると、手書きの計算により Lspb=0.85182 [m],Lbpb=0.62615 [m] となり、次の計算をしてみると Vs/Lspb=1.3103 [rad/sec] Vu/Lbpb=1.3103 [rad/sec] となり、Poを中心に同じ角速度で回転している事が分ります。 この回転の角速度を『ωrb』としておきます。【図C】にも書いてある様に Vz を、PzからPoまでの距 ↗#S |
#S 離:Lzpb で割ってみても同じ角速度 ωrb が得られるので、少なくとも短い時間の間はPzもMfやMbと同様にPoを架空の回転軸にして、全体が ωrb で回転している事が判ります《→*29a》。 その回転の解析の為に先ず、この回転で発生するサスペンションのバネに因る、Poを回転軸とするトルクを計算します。 いま車体全体が【図A-b】のPo を中心に小さい角:θ[rad]だけ左回転をするとMfの高さは Lspb*θ*cos θspb だけ下がります。更に、前輪車軸からMf までのフロント・フォーク《長さ Los 》も、ロック前はキャスター角 ↙#T |
*29a 左記の「少なくとの短い時間の間は・・・(車体)全体がPoを中心にして ωrb で回転している」と書きましたが、これだけでは表題の「◉車体全体の回転減衰振動」を証明した事にはなりません。 例えば時間が経つにつれて回転の中心Poの位置がずれてしまうのかもしれません。しかし、【図A-a】でMfとMbは「微小時間⊿t 」の間は“直線運動”ではなく、Poを中心とする“円運動”をしている筈です。何故ならば例え「微小時間」とは言え直線運動ならばMf,Mb,Poの3点間の距離が微妙に異なってしまうからです。ところが“円運動”ならばPoの位置が変わる筈もなく、その「微小時間⊿t 」を積み重ねていけば いくら時間が経ってもPoの位置は変わらない事が分かります。 |
| #T θca の傾きであったものが、θ だけ傾き角が小さくなって“θca-θ”となり、仮に前輪が付いていない場合《バネの伸び縮みが無いとき》にはフロント・フォークを真下方向に測った長さ《フロント・フォーク上・下端の高低差》は、Los*cos θca から Los*cos(θca-θ) に増えた事になります。 その高低差の変化量は θ が小さいとき Los*cos(θca-θ)-Los*cos θca =Los*(θ*sin θca) 《→*30》 です。この値に、上記の、Mf の位置が真下方向に下がった量を加えると、フロント・フォークの下端は、合わせて Los*θ*sin θca+Lspb*θ*cos θspb =(Los*sin θca+Lspb*cos θspb)*θ だけ下がる事になります。 しかし、フロント・フォークの下端には前輪の車軸が付いていて、且フロント・フォークは伸び縮みするので、上記下端の路面上の高さは変わりません。その為、フロント・フォークは真下方向に計った長さで上記 (Los*sin θca+Lspb*cos θspb)*θ だけ縮みます。この縮みはフロント・フォーク自身が (Los*sin θca+Lspb*cos θspb)*θ/cos θca という、上記真下方向の縮みよりも(1/cos θca)倍 大きい長さだけ縮まなければ実現しません。このバネの縮み《前述の“X”》を、Vs 方向の変位:Lspb*θ で割った比率を『後輪ロック時のVs 方向から Vx 方向への変換率』と名付け、その値を『Kxsb』とすると Kxsb=(Los*sin θca+Lspb*cos θspb) /(cos θca*Lspb) =1.216156 《→*31,*31a》 となります。フロント・フォークのバネの縮み:X を、この係数を使って表すと X=Kxsb *Lspb*θ 。 この縮みにバネの硬さ:Ksc を掛けるとバネの力になり、 #U↗ |
#U その力に cos(θspb-θca) を掛けるとその力のVs 方向《線分MfPo と直角方向》成分になり、その力成分に Lspb を掛けるとフロント・フォークのバネが θ の回転方向に出すトルク: -Kxsb*Lspb2*θ*Ksc*cos(θspb-θca) となります《左回転のトルクを正としています》。 また、後輪のバネは θ の回転によって真上方向に Lbpb*θ*cos θbpb だけ伸び、その値にバネの硬さ:Ku を掛けると真下方向の力になり、その力のVu方向成分は -Lbpb*θ*cos2θbpb*Ku となり、その値に Lbpb を掛けるとPoを回転軸とするトルク: -Lbpb2*θ*cos2θbpb*Ku になります。このトルクに、上記前輪のバネが出すトルクを足すと、前・後輪のバネによるトルク:『Tkb』は Tkb=-Kxsb*Lspb2*θ*Ksc*cos(θspb-θca) -Lbpb2*θ*cos2θbpb*Ku =-Kib*θ となります。ただし Kib=Kxsb*Lspb2*Ksc*cos(θspb-θca) +Lbpb2*cos2θbpb*Ku= = 次に後輪ロック以降のダンパーに因る、Poを回転軸とするトルクを計算します。 車体全体が小さい振れ角 θ だけ左回転したときのダンパーの動きは、前・後輪とも上述のバネの動きと全く同じであり、発生した力がトルクになる係数もバネの場合と全く同じ計算なので、ダンパーにより発生する制動力トルク:『Tdb』は、上記の式“Tkb=-Kxsb2*・・・・・・”の中の、変位を力に換えるバネの係数:Ksc とKu を、速度から力に換えるダンパーの係数:Rsc と Rzu に入れ替え、変数:θ を dθ/dt に入れ替えれば良いのです。つまり、 ↙#V |
*30 γ を任意の角度とすると、θ[rad] が微小であるときには cos(γ-θ) =cos γ-d(cos γ)/dγ *θ =cos γ+θ * sin γ *31 【図A-b】を見れば明らかな様にフロント・フォークの方向はVsの方向とほぼ一致しているので、Mfの動き Lxsb*θ がほゞそのままバネの縮み X になり、変換する比率:Kxsb の値は直感的には1.2・・・ではなく ほゞ1.0なのではないかと思いがちです。 しかし、線分MfPoが θ[rad]だけ回転すると、前輪車軸が僅かながら後方に移動するので、フロント・フォークの縮みはMfの移動 Lxsb*θよりも大きくなり、Kxsb が1.0よりも大きくなるのです。 *31a この後輪ロックの場合の 『Vs 方向から Vx 方向への変換率 Kxsb』 は、前輪ロックの場合の「車体全体の回転減衰振動」で述べた「Vx/Vs」《=X/(Lsp * θ)》と全く同じものですが、その数値の求め方と式が全く違います。 従ってどちらかが間違っているかもしれないのでチェックします。この式「Kxsb=・・・・・」の中の Lspb と θspb は【図A-b】に示す長さと角度の値ですが、その値を前輪ロックの場合の【図22-c】の Lsp,θsp の値にすると、「Kxsb=・・・・・・」の値は前輪ロックの場合の Kxs の値(0.716665)と一致するので、計算方法などは、両者とも正しいと見做せます。 |
| #V Tdb=-Kxsb*Lspb2*dθ/dt *Rsc*cos(θspb-θca) -Lbpb2*dθ/dt *cos2θbpb*Rzu =-Rdb*dθ/dt となります。ただし Rdb=Kxsb*Lspb2*Rsc*cos(θspb-θca) +Lbpb2*cos2θbpb*Rzu = = 次に後輪ロック以降のライダーこみの車体の慣性力に因る、トルクを計算します。 点Poを回転の中心とする慣性モーメント:『Imb』は Imb=Mf *Lspb2+Mb *Lbpb2 =139.789 [kg*m2] であるので、慣性力によるトルクは -Imb*d2θ/dt2 です。 以上のバネ,ダンパー,慣性力によるトルク以外に外力が無いとすれば Imb*d2θ/dt2+Rdb*dθ/dt+Kib*θ=0 (22b) となります《→*31b》。 「◉前輪ロックの場合」の(22)式の係数を後輪ロックの場合の係数に置き換えると、この微分方程式の解は(23)式により θ=C1b *ε-αb *t *sin(wb * t ) (23b) =C1b *ε-αb *t *sin(2π*t/Ttb) [rad] となります。ただし、C1b はこの時点では任意の定数、αb と wb は (24)式と(25)式の係数を入れ替え、 αb=Rdb/(2* Imb) (24b) = #W↗ |
#W wb=SQR(4*Imb*Kib-Rdb2 )/(2*Imb ) (25b) = とし、オイル制動が無い場合の振動の周期をTtob とすれば、(26)式の係数を入れ替ると Ttob=2π*SQR(Imb/Kib) (26b) = となります。オイル制動が有る場合の振動の周期 Ttb は、(27)式の係数を入れ替え Ttb=Ttob/SQR〔1-Rdb2/(4*Imb*Kib )〕 (27b) = (23b)式の θ を時間 t で1回微分した角速度[rad/sec] の値に 線分MfPoの長さ Lspbを掛けたものが、前述の手書き計算で得られた点Mf の速度 Vs であるので、後輪ロック直後(t=0)では、 (dθ/dt)*Lspb =C1b*〔-αb*1*sin 0+1*wb*cos 0〕*Lspb =C1b*wb*Lspb = Vs (後輪ロック時の Vs ) =1.11614 [m/sec] ∴C1b=Vs/wb/Lspb (28b) = C1bの値が分ったので、フロント・フォークの中のバネによる力:『Fkb』と,ダンパーによる制動力:『Fdb』及び、その2つの力の和の力:『Ftb』は次の計算により求められます。 wb*t=St とおいて、(23b)式から Fkb=Lspb*θ*Kxsb*Ksc =Lspb*C1b *ε-αb*t *sin St*Kxsb*Ksc (29b) Fdb=Lspb*(dθ/dt)*Kxsb*Rsc =Lspb*C1b*ε-αb*t *〔-αb*sin St+wb*cos St〕 *Kxsb*Rsc (30b) Ftb=Fkb+Fdb 。 (31b) ↙#X |
*31b 実はこの(22b)式はもう一つのトルクを無視している式です。 「前輪ロック」による停止の場合には、t=0 以降は 前述の「サスペンションの力と慣性力」以外には 車体のどの部分にも外力は加えられていませんでした。しかし、「後輪ロック」の場合には、Po中心の回転減衰振動の「動き」に因って車体が受ける前・後のサスペンションの力とMfとMb自身の慣性力の他に、車体上の現実の点:ピボットPzが接地点Dから 力を受けています《これは次ページの注*37bで 力の方向を含めて詳しく述べています。PzはDから t=0 の直前に極めて大きな力で引っ張られられましたが、t=0 以降も力を受けています》。 もしも、後輪の半径が 0 に近い小さい値である場合には Kr≒0 ∴ θpz≒θp となって、点Poは線分PzD上に来るので上記のトルクは発生しないのですが、Kr も θp も共に図の様な現実の値であるので、図の θpz が θp よりも少し大きくなり、Poの位置は線分PzDよりも下に来ます。従って、ピボットPzに働く力が Poを回転軸とするトルクになります。 しかし、回転減衰振動の計算結果を図に画いた【図A-b】が示す様に、Pz~Po間距離は近い《ピボットPzは線分PzD方向には拘束されている為 当然そういう計算結果になります》ので、Poと線分PzDとの間の距離は小さく、Pzに働く力によるトルクは小さい値になり、無視しています。 尚、t=0 の後、「車体本体がピボットPzに対して働く力」は、MfとMbに働く慣性力と前・後のサスペンションの、計4つの力の合計の力 |
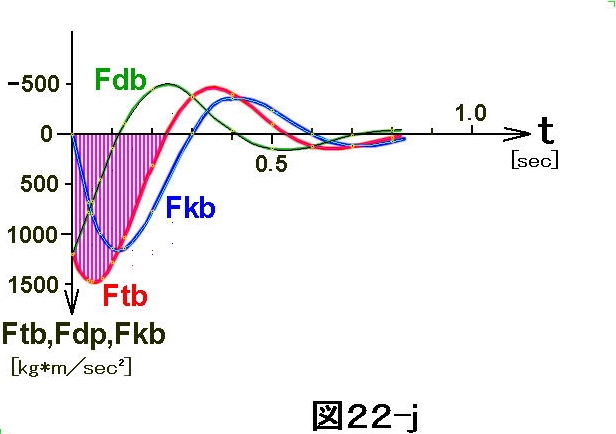
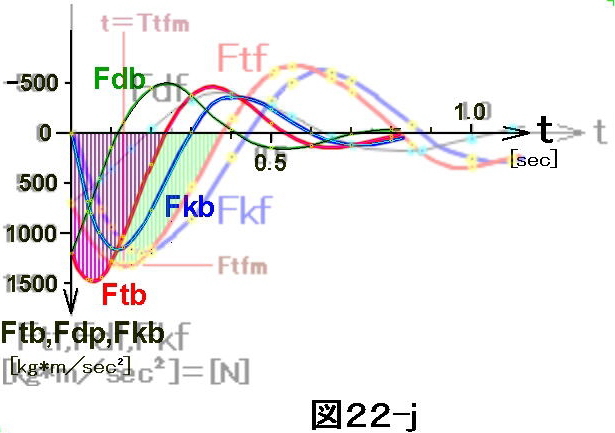
| #X 右の「スライド・ショー」の二番目のグラフ【図22-j】が、上述の計算の、それぞれの力の実際の値を示しています《停止前の徐行速度 V1=1 m/sec》。 その三番目のグラフは同時比較の為、後輪ロックのグラフに前輪ロックのグラフ【図22-e】を薄っすらと入れておきました。 このFtb は図の赤線で示されていますが、時間 t=0.0534 [sec] に最大となり、その値は Ftbm=1670.42 [kg*m/sec2]=[N] =170.451[kgw] となります。そのとき、フロント・フォークのバネの力,及びとダンパーの力は Fkb=946.83 [N] =96.615 [kgw] Fdb=723.60 [N] =73.836 [kgw] となります。 上記Ftb の最大値 Ftbmに、上述の横倒し係数 Kfd(=30.939/680*cos θca=0.040894)を掛けると、総重心位置での最大横倒し力:Fsdbmになり、その値は: Fsdbm=68.310 [N] =6.9704 [kgw] となります。 前輪ロックのグラフに比べてフロント・フォークの力が最大になる時間が早まり、そのピーク値が大きくなった事も分ります。 しかし、その効果を正確に比較するには、「◉前輪ロックの場合の現象」で述べた様に、バイクを倒す力の原動力Ftbに、重力に因る横倒し力をも加えて積分する必要がありますが、それは後述の「◉前・後輪ロックの場合の比較」の項で行います。 |
 |
||||
| 次に、シートに座る位置の動きの影響も計算します。シートに座る位置を【図A-b】の様に Ps とし、線分PsPoの長さを Lsob とすると、【図22-d】での比例計算などにより Lsob=SQR[(0.819-Lspb*cos θspb)2+(Lspb*sin θspb+0.027)2] =SQR[0.076182+0.443902] =0.45039 [m] 。 線分PsPoが鉛直線《真上方向》となす角度を θso とすると θso =atn(0.0762/0.44390)=0.001700[rad]=9.738 [°] 。 従って、t =0 のとき、ライダーが座っている座面 ↙ |
上述の式(28b)のC1b の値が正しい値の1.11127分の1の小さい値になった ままこのグラフを画いたので、後輪ロックの場合の力(Ftb,Fkb,Fdb)は全て図に画いた値よりも1.11127倍大きい値です。本文の数値は修正しています。 | *31bの続き 一方、車体本体とは逆の方から、“路面が後輪タイヤに対して働く力”を見ます。すると、次頁の注*37bに書いて有る様に【図A-b】の右方向の「摩擦力」と、回転減衰振動による「路面が後輪タイヤに対して出している力の変化分」《サスペンションの力の反作用の変化分であり、t=0 の後の時間帯ではその変化分は負なので下向きの力》との合力が斜め下方向の力となり、路面は接地点DからピボットPzを斜め下方向に引っ張る力を出していることになります。 また 上の*31bで述べた「車体本体がピボットPzに対して働く力」は、上記の様に慣性力とサスペンションの力の合計であるので t=0 の後の時間帯では車体本体がピボットPzを斜め上方に引っ張る力となり、上記路面がPzを引っ張る力と釣り合っています。 |
|||
| は上記《本文#S》車体全体の回転角速度 ωrb (=Vs/Lspb)の回転により、斜め上方向には ωrb*Lsob=1.3103*0.45039=0.59015 [m/sec] のスピードで進みますが、その速度の真上方向成分はライダーを真上方向へ放り上げる『抛り上げ速度:Vafb』となり、その最大値は Vafbm=ωrb*Lsob*sin θso=0.09984 [m/sec] という速度になります。 そのとき、ハンドルの動きは【図22-j】のバネによる力:Fkb の時間パタ-ンと全く同じに動きになり、一方、シートの動きはハンドルとは上・下逆の動きで、しかもその動きが【図22-j 】の様に速いので、ライダーは「フロント・フォークが沈み込んだ」以外には事態が掴めない状態に陥ります。 しかし、上記 放り上げ速度が横倒し速度を上回る様な大きさであっても、そのときシートが上昇する高さが小さけれ #Y↗ |
#Y ば問題にする必要がないので、その高さを求めます。その為に、上述の「回転軸」Poを中心にした回転角θの最大値:『θbm』を求めます。 θ が最大になるときは、θ を微分した(30b)式の〔・・・・・・〕の中がゼロになるときです。そのときの上記St と時間 t をそれぞれ『Stbm』,『Tkbm』とすると Stbm=atn(wb /αb) =1.2354 [rad] Tkbm=Stbm/wb =0.11680 [sec] 。 故に、車体全体の振れ角の最大値θbmは、(23b)式から θbm=C1b *ε-αb *Tkbm * sin Stbm=0.076051 [rad] =4.3574° となるので、『ライダー放り上げ高さ:Lyb』は Lyb=Lsob*〔cos(θso-θbm)-cos θso 〕 《→*31c》 =0.00451 [m] ≒0.5 [cm] となります。この僅かな動きはその上昇の時間が短いことも有ってシートのクッションに吸収され、実質 0 cmと言えます。 従って、後輪ロックの場合には上記ライダーを放り上げる「放り上げ速度」の効果は無いので後輪ロックの方がやや踏ん張り易くなります。 ↙#Z |
*31c θso は後輪ロックの場合の線分PsPoの傾き角( |
| #Z ◉前・後輪ロックの場合の比較 |
|||||
| 今まで前・後輪ロック後、バイクの「横倒し」の原因となるフロント・フォークが路面を蹴る力が正の時間帯に注目してきました。しかし、その後 横倒しの力が負になっても車体は倒れ続けるので、ライダーがそれに対処する:つまり倒れ掛かっている事に気が付いて足を踏ん張る迄の時間を解析の対象とすることにします。 普通、車の教則本などでは走行中、危険を認知してからブレーキが効き始める迄の時間を「反応時間」として1秒が見込まれています。ところが、ちょっと古いのですが「自動二輪車運転教本」には、「空走距離」から換算して反応時間は 0.5秒になっ #Z1↗ |
#Z1 ています。その為、前輪または後輪がロックしてから傾きかけた方の足を踏ん張る迄の時間を0.5秒とか0.8秒位と見込んで、0.9秒までの横倒し力の力積を積分してみることにしました。 更に、車体が傾いた事に因る、重力の“横倒し方向成分”を加えた力積の計算により、車体が倒れる速度等を計算しました。車体が倒れるときは、タイヤの接地線分CDを回転軸の様にして倒れるので、総重心Mrは【図22-k】の様にCDを中心とする円周の軌道を描いて倒れます《→*31d》。その軌道上に【図22-k】の様に円弧状の座標:『Z』をとります。 ↙#a |
*31d バイクが大きく倒れる場合には、厳密にはサスペンションのバネが伸び 更に前・後輪タイヤが路面を横に転がるので、バイクを真後ろから見たときのMrが描く軌跡は水平方向を長軸とする楕円に近くなりますが、問題となる0.5秒で倒れる距離(Z)は、計算結果では前・後輪ロックで共に6㎝程度である為、ほゞ 円と見做せます。また、厳密にはタイヤには太さが有るので横方向に転がるのですが、それは最後の頁で計算に入れます。 | |||
 図22-k この図は接地線分CDの延長線上から見たもので あるので、図中の寸法の31.3mmは、15.3mmの誤り #a この【図22-k】の中の「(Mr)」は、ハンドル角25°で 総重心が接地線分CDの真上に在るときの状態ですが、図中の「Mr」は、総重心を「(Mr)」からカーブの内側に角度『δ』[°]だけ傾けながら急な左カーブを曲がっている状態を示しています《→*32》。 右の【図22-l】は、【図21-b】の様にバイク本体中心面が路面に対して垂直になる様にしながら、ハンドル角25°でカーブを極めてゆっくりと曲がったとき《その為にはバイクがカーブの内側に倒れない様に内側の足に力を加えていなければなりません》、その状態を真上から見た図です。前輪の回転軸を中心軸とするタイヤ外周のうち、接地点Cを通る外周《これを『接地外周輪』と呼ぶことにします》を【図22-l】の中の赤の楕円で示しています《→*33》。 その接地外周輪上で、接地点Cから例えば前・後1cm 離れた2点間を結んだ直線《つまり赤の楕円の点Cにおける接線(青の矢印の線)》が、本体中心面方向となす角度を図中の楕円の座標から計算すると、その角度は22.729°となります《→*33a》。 バイクを小さい距離だけ進ませたとき、タイヤは次々と新しい接地点を辿りながら進むので、前輪は点Cからの青の矢印の方向に進み、後輪は点Dからの矢印《本体中心面》の方向に進むので、バイクは両輪のそれぞれの進行方向に対して直角な線の交点、図中の点Oを中心に回ることになります。 すると総重心Mrの移動軌跡は青の円弧となり、その曲率半径は同図の幾何学計算により図中の3.4580[m] となります。これは上記の様にバイク本体中心面を直立させた状態のものです。 このときは前輪のみが10.677°傾き《*↑》、前輪タイヤの太さが 0 の場合に比べ、太さΦ123mmに因って接地点Cが図中の点Oの方向に 61.5*sin10.677°=11.4mm だけ移動する事が計算に入れられています《50.3-11.4*cos22.729°=39.8 , 20.8*(39.8/50.3)=16.5 》。 バンクする前の基準状態としては、ライダーが両足の爪先に力を加えずにバイクを静止させている状態を基準にしなければならないので、Mrが点Cと点Dとを結ぶの線分の真上に在る状態《【図22-k】で δ=0 の状態》を計算します。その為にはMrを【図22-l】の状態から次の距離: 31.330*700.2/1431.5=15.325[mm] だけ“図”《【図22-l】》の上方(カーブの外側)に移動させさせなければなりません《39.8-8.5=31.330》。そのとき【図22-k】の δ=0 の状態に本体中心面を真後ろから見て右に傾ける角度は tan-1(15.325/680)=1.291° となります。 徐行速度1[m/sec]のときの遠心力を計算した補正計算方法を《*34》に書いておきました。その計算結果は、ハンドル角25°の場合、Mrが描く回転半径:『Rcu』は Rcu=3.4526[m] |
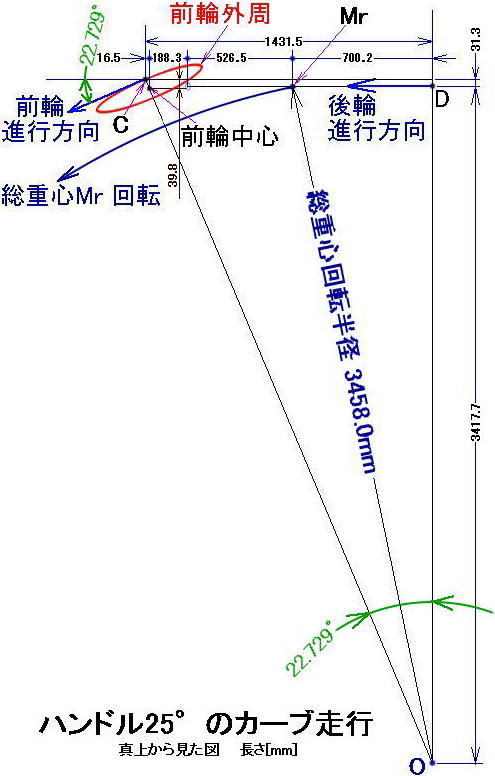 図22-l この【図22-l】は、バイク本体中心面が直立状態の図。 この図の赤の楕円は 本文中の「接地外周輪」。 |
*32 【図22-k】により、δ=Z/Lg [rad]。ただし Lg は総重心Mrの路面からの高さ:0.68m》。 *33 本体中心面が直立しているときには、後輪の最外周部は路面に図のD点で接地していますが、前輪の最外周部は路面から僅かに浮いた位置に在ります。その最外周輪はこのページ冒頭の【図21-a】上部の「赤の楕円」であり、その最外周輪の【図22-l】での位置は、同図の赤の楕円(接地外周輪)の位置よりも 61.5*sin10.677°=11.4mm だけ点Oと反対側《線分OCの延長方向》 に離れた位置に在ります。その最外周輪の中心が図中に示されている「前輪中心」です。つまり、「前輪中心」は【図22-l】の赤の楕円の中心には在りません。 *33a 数学クイズ ハンドルを25°に切っているのに前輪が22.729°の方向に進むのに対しては、疑念を持つ人がいると思います。 では、22.729°は正しいのかどうか、確かめる計算をしてみましょう。 ヒント 「座標変換」?などの難しい方法が有るのかもしれませんが、以下はより直感的な方法。 先ず、ハンドルを25°切った状態の、タイヤ幅がゼロのときのタイヤ外周輪を「最外周輪」としていますが、その「最外周輪」の中心を点Bとし、座標の原点とします。その「最外周輪」上の点で、B点と同じ高さになる点を求め、その点をAとします。そのA点の、【図21-a】及び【図21-b】のそれぞれの座標(2つ)を求めると、線分ABの、真上から見た方向が分かります。 すると、その線分ABは、タイヤの「接地外周輪」の、前輪接地点Cに於ける接線と平行なので、前輪が進む方向が分かる・・・・・・という方法で計算出来ます。 その方法では22.739°となりました。22.729°は、少しだけ正確ではありませんでした。 *34a《左の*34の中の注》 前輪タイヤが転がる距離の計算は、接地外周輪の接線方向にも少し転がるので複雑となり、 61.5*sin(δ-1.291) よりも大きい値となりますが、転がる角度(δ-1.291)が小さく《0.402°》、徐行時のバンク角 δ 等の計算への影響は無視出来るので、単純な計算にしています。 |
|||
| *34 左記の δ=0 の状態から徐行スピードを 1[m/sec] に上げたときの(真の)バンク角を δ [°] とし、そのときのMrを真上から見た回転半径を『Rcu』[m]とすると、バンク角 δ は δ=tan-1[(12/Rcu)/g]*180/π [°] 《 g=9.8 [m/sec2] 》となり、車体本体中心面の傾き角は(δ-1.291°)となるので、前輪と後輪のタイヤ幅が 0 の場合には、Mrは 0.68*sin(δ-1.291) [m] の距離だけ、【図22-l】に示されているMrの位置よりも図の下方向に移動します。 更に、前輪および後輪タイヤの断面の曲率半径が実測でそれぞれ61.5mm,93.3mmであるので、両タイヤが上記角度(δ-1.291)だけ図の下方向に転がり、前輪の接地点Cが図の下方向に移動する距離は 61.5*sin(δ-1.291),後輪接地点Dのそれは 93.3*sin(δ-1.291) となります《→*34a》。従って、上記車体本体中心面の傾き 680*sin(δ-1.291)+61.5*sin(δ-1.291)* また、車体が傾く等してMrが移動しても、傾き角が小さいので前・後輪の進行方向によって決まる“回転の中心Oの位置”の移動は無視出来ます《O点の位置はC点とD点の移動方向(進行方向)によって決まるので、バイク本体が少し位傾いただけでは変わりません》。その為、上記Mrの下方向への移動は総重心Mrの回転半径(Rcu)の減少となります。 ↓ |
| となり、バンク角は δ=0.029546[rad] =1.6929° となります。 このバンク角 δ で徐行しているとき飛び出し等で、時間 t=0 に急に停止すると、遠心力が無くなり重力だけが残ります。 その時、総重心Mrがタイヤの接地線分CDの真上に在る状態からバンク角:δ だけ傾いているので、その傾きと重力とによってMrに対して Z 方向の『傾きによる横倒し力:Fgz』が働きます。その値は上記 t =0 の時 Fgz=Mr *g *sin δ =69.483[N] =7.0901[kgw] 。 一方 前述の、前輪タイヤがフロント・フォーク方向に路面を蹴る力《前・後輪ロックのとき、それぞれ Ftf,Ftb →*35》の値に 上述の横倒し係数:Kfd(=0.040894 →*35a) を掛けた力を、総重心Mr位置での『フロント・フォークに因る横倒し力』と定義して、前・後輪ロックの場合 それぞれ Fszf と,Fszb とします。 その「フロント・フォークに因る横倒し力」と、上記「傾き δ に因る横倒し力」とを足した力を『トータル横倒し力:Ftz』と定義すると、前・後輪ロックの場合、それぞれ Ftz=Fszf+Fgz , Ftz=Fszb+Fgz となります《前・後輪ロックの場合、変数などは同じ文字を使っています》。 今、小さな時間⊿t (=0.002 sec で計算)の間 この力を受け続けると、それぞれ Ftz*⊿t , Ftz*⊿t の「力積」を受けたことになり、その値を総質量 Mr で割ると、総重心位置Mrでの Z 方向(円弧の接線方向)の『横倒れ速度:Vtz』の増加分:⊿Vtz となります。それを“ベーシック・プログラム流”に表すと、前・後輪ロックの場合、それぞれ ⊿Vtz=Ftz*⊿t/Mr Vtz=Vtz+⊿Vtz , ⊿Vtz=Ftz*⊿t/Mr Vtz=Vtz+⊿Vtz となります《下の段が後輪ロックの場合》。 すると、この時間⊿t 内に倒れた Z 座標上の距離⊿Z は、微小時間⊿t の前と後の平均速度に⊿t を掛けたものである為、 ↗#b |
(*34の続き) 従って上記バイク本体の傾き(δ-1.291)とタイヤの接地点の移動とに因って減少した回転半径Rcu を計算するには、ポケット・コンピューターに次のプログラムを書き、「G.20」 《“GOTO 20”の意味 ( 20 はプログラムの行No.)》とキー・インすれば計算します。 20 GOTO ”Rcu” 2432 ”Rcu” V1=1:Rcu=3.458:DEGREE (角度は[°]で計算) 2433 ”NewRcu” δ=ATN(V1^2/RCU/9.8) (δ は例えば SDE とキー・インする) 2434 Rcu=3.4580-sin(δ-1.291)*{0.68+[0.0615*700.2+0.0933*(1431.5-700.2)]/1431.5}/cos[atn(700.2/3417.7)] 2435 PRINT ”Delta”;SDE;”Rcu”;RCU:STOP 2442 GOTO ”NewRcu” 2443 END “C.”と“Enter(↲)”の3つのキー操作をすれば再計算をします。2回目以降の計算から上7桁は同じ値(補正後のRcu)になります。その値は V1=1 [m/sec] のとき Rcu=3.45257[m] 。 《 V1=2 [m/sec] のときは Rcu=3.3827m》 バンク角の補正《バンクした事によって Rcu が小さくなり、その為に遠心力が増えてバンク角 δ が増え、その δ の変化が Rcu の値に影響を与えるという、相互補正》後の値 δ は V1=1 [m/sec] のとき δ=1.6929° 。 《 V1=2 [m/sec] のときは δ=6.8802°》 |
*35 FtfとFtbは、それぞれ(31)式および(31b)式で得られた値です。 *35a フロント・フォークに因る横倒し力が発生するメカニズムは、前輪ロックと後輪ロックの場合で変わりが無いので、この係数は共通です。 *35b 「初期値」 については、前輪ロックや後輪ロックが行われる前の状況なので、両者に共通です。 |
|||
| #b 前・後輪ロックの場合、それぞれ ⊿Z=〔Vtz+⊿Vtz/2〕*⊿t , ⊿Z=〔Vtz+⊿Vtz/2〕*⊿t 《この式の中のVtzは増加する前のVtz》となり、新たなZ座標は、 Z=Z+⊿Z , Z=Z+⊿Z 。 バイクがバンクしていないとき(δ≒0 のとき)の、Mrの路面からの高さを Lg(=0.68[m] ) としているので、新たな傾き δ=Z/Lg [rad] と計算されます。最初の t=0 における δ の値は上述の補正計算後のバンク角0.029546[rad](1.6929°)であるので、Zの初期値を《→*35b》 Lg*0.029546=0.020092[m]=2.0092[cm] ↙#c |
| #c にして、上述の⊿Zの加算演算を始めます。また、停車した瞬間( t=0 の時)にはカーブの内側に倒れる速度は未だ 0 であるので、Vtzの初期値は 0 にして、上述の⊿Vtzを加算していきます。 その加算計算(つまり積分)を t=0 から t=t まで、⊿t ごとに、Vtz や Z の増加分(⊿Vtz,⊿Z)を積算していくと、【図22-m】の様に車体が倒れ始めてから時間“t” が経過したときの横倒れ速度:Vtz、およびMrの変位(移動量):Zの値《黒の放物線に近い曲線》が得られます。しかし、正確な計算は最後の頁を御覧下さい。 【図22-m】の第一のグラフは後輪ロックの場合《Fszのサフィックスが“b”になっています》,第二のグラフが前輪ロックの場合で、第三のグラフが後輪ロックのグラフに前輪ロックのグラフを薄っすらと重ねています。 この二つの場合の比較をすると、後輪ロックの場合、ロックしてからの時間:t が0.2秒から0.5秒にかけてフロント・フォークによる横倒し力:Fszb が負の値になる為、倒れる速度:Vtz 《茶色》の増え方が僅かながら少なくなっています。 結果として0.5秒経ってから足を踏ん張ろうとしたとき、後輪ロックの場合倒れる速度:Vtz が33.899[cm/sec]であるのに対し、前輪ロックの場合は36.24[cm/sec] の速さになり、違いの比率では6.9%でしかないので、前・後輪ロックで大きな差はない事になります。 バイクが倒れ始めたとき、一刻も早く、しかも極く短時間で横倒れ速度:Vtzをゼロにしないと、傾きに因る横倒し力によって横倒れ速度が大きくなってしまい、ますます「転倒を引き止める事」は不可能になります。 例えば前輪ロックの場合、t=0.5秒以降は、ライダーが腰を浮かした場合、倒すまいとする対象は車体だけの180kgとなるので、車体重心位置G(路面から0.584m)での倒れる速度は 0.3624*0.584/0.68=0.3113 [m/sec] 【0.2911】 となり《 以下【・・・】の中の数字は後輪ロックの場合 》、その運動量は 0.3113*180=56.03 [kg*m/sec] 【50.98】 になっています。この運動量を0.1秒間でゼロにする(転倒を引き留める)為には 56.03/0.1=560.3 [N] /9.8=57.17 [kgw] 【52.40】 |
 |
← 図22-m 上述の計算で後輪ロックの場合の係数 C1b の値の計算違いを本文で修正しました《本文#W》が、この図は、その修正された C1b の値に基づいて画かれています。前輪ロックと後輪ロックとの差は、修正前よりも更に小さくなりました。 t=0 から始まるVtz,Fgz,Ftz,Z は縦軸の左側の太字の目盛の値ですが、t が大きくなってスケール・オーヴァーした(Vtz),(Fgz),(Ftz),(Z)の値は縦軸右側の、5分の1に圧縮した目盛でお読み下さい。 |
|||
| もの大きな力《これを『引き留め力:Frz』としておきます》が必要です《車体の重心:G位置換算。t=0.5 以降 重力など他の力がゼロとしたとき》。その0.1秒の始まり( t=0.5 sec の時)には、前輪ロックの場合トータル押し倒し力:Ftzは車体だけの重心G位置換算では また、足が踏ん張るとしても、実際の「倒すまい」とする力はライダーがハンドルに加えるので、ハンドルの高さを、地上58.4cmのG位置よりも充分高くしている場合は、てこの原理により、足をしっかりと踏ん張れる様に足着き性さえ良くしていれば転倒を免れる事が出来ます《→*36》。 なお、今までの計算では時間(t)の経過とともにバイクが倒れて傾き角が増え、タイヤが車体左側に転がる事に関しては、その転がる距離は小さいものと見做して無視しています《【図22-m】によればロック後の時間が0.5sec 経った時、Mrの横方向の移動量:Zが、前・後輪ロックの場合、それぞれ9.5cm,9.2cm 《 *10 mm 》であるので、前後方向のMr位置での上記転がりに因って線分CDが総重心Mrの方に接近する水平距離は #e↗ |
*35c ライダーが腰を浮かせた後 バイクが倒れる力:Ftzの構成要素の一つ:Fgzの重力は 180kg に対してだけ働き、また、同:Fszの力はG位置では0.68/0.584倍になるので、前輪ロック時では【図22-m】第二図の結果から、t=0.5sec ,G位置換算で Ftz= 22.27/57.17=39 % 。 【後輪ロック時】は【図22-m】第一図の結果から、t=0.5sec ,G位置換算で Ftz= 23.92/52.40=46 % 。 #e 前輪ロックの場合でも つまり、t=0 までの、積分の為の初期条件の計算には徐行時のバンク角による転がりを計算しているのですが、それ以降の「転がり」については無視しています《t=0 以降 車体が傾いても接地線分CDの位置は移動しないとしています》。 それを無視したくない場合には、次頁で前・後輪の横方向の転がりと、更に後輪のサスペンションの力も計算に入れた正確な計算をお読み頂きたいと思いますが、いま最も関心の有る「前輪ロックと後輪ロックでどの位違うか」という事に対しては、【図22-m】の第三図が示す様に「大きな違いはない」と言えます。 |
*36 バイクの購入時に、ハンドルへの配線を延長しなければならない程ハンドルのグリップ位置を高くして貰いました。 また、ガソリン・タンクにしがみ付いた様な姿勢で乗るタイプのバイクの場合、身体の重心よりも低い位置にハンドル・グリップが在るので、他車との衝突時にいくら両腕を硬直させても頭と身体は前に行ってしまいます。ハンドル・グリップの位置は、頭の位置よりも低い範囲内で高ければ高いほど、腕の力によって、頭が前に行く速度を小さくする事が出来、衝突時の死亡は少なくなると思います。 *37 t=0 以降にタイヤが転がることを計算に入れる場合には、転がる事によって線分CDが総重心Mrの水平位置に接近するので、【図22-m】の t の値が大きい程、倒れる速度などは【図22-m】の計算結果よりも小さくなります。 |
#f ◉停止時転倒の予防策 |
|||||
| 私がバイクの免許取得の為の訓練を受けたとき、教官に「足を着きながら進むのは下手に見える。スッ!と進んでサッ!と止まるのだ」と言われました。 しかし、そのサッ!と止まる直前のスピードが重大な問題です。直進状態から停止する場合には問題ないのですが、狭い場所でハンドルを切って曲がるとき、あるいは重心移動 #g↗ |
#g をする為にハンドルを切って、メリハリの有るスピードで「サッ!」と止まろうとするときには、どうしても停止前のスピード:V1は1[m/sec] 位のスピードは出てしまいます。 その止まる前のスピードやハンドルの切り角など今まで解析してきた条件の場合には、前ブレーキで止まろうが、後ろブレーキで止まろうが、早めに踏ん張らないと転倒してしまいます。そこで、その様な悪条件で停車しても転ばない方策を挙げます。 ↙#h |
||||
| #h 第一に、「下手だ」と思われるのを覚悟して、足を着きながら止まります。 私が山間の美術館の、坂道の様な駐輪場に駐輪しようとしたとき、若い女性が見ていました。それで、メリハリを付けて止まったのが良くなかったのです。その時には左側が下り傾斜だったので重心Mrを山側に傾けながら、つまり右足を着きながら止まるべきでした。 「見栄を張らずに足を着く」、特に傾斜地では「メリハリを付けずに山側の足を着く」というのをモットーにすべきだと思います。 第二に、特に前輪で急停車する場合、上記「サッ!」とではなく、「ズルズルッ!」と、時間を掛けて止まる方がベターです。 【図22-m】)が示す様に前輪ロックの場合 フロント・フォークが悪さをするのは Fszf が正の時間帯(0.4秒間)であり、その後のFszf が負の時間帯はむしろバイクを「倒すまいとする力」を出しています《→*38》。従って、その正と負の時間帯が重なり合う様、ブレーキの効き始めからロックして停止するまでの時間を0.4sec以上 掛ければ、正と負の力が打ち消し合うので横倒れ速度を小さくする事が出来ます。機械式の腕時計の刻みは1秒を0.2秒刻みで「1,2,3,4,5,1,2,3,4,5,・・・・・・」と繰り返していますが、その2刻み分(ぶん)の時間を掛けてブレーキを掛ければ良いのです。 上述の様に、前輪ロックと後輪ロックとの間には一般的に考えられている程、大差は有りません。従って、飛び出し等に対する素早さおよび「ブレーキ操作はソフトに 且つ時間を掛けた方が良い」ことを考えると、前ブレーキの方が良い場合が有ります。 第三に、急停車に備えて、ハンドルを切った方と反対側の足を着く事です。横倒れ速度Vtzは、横に倒す力Ftzによって増加しますが、そのFtzのうち最も大きな力は、【図22-m】 #i↗ |
#i を見れば明らかな様に、総重心の重力に因る力Fgzです。 しかし、そのバイク転倒の最大原因を逆に転倒を防ぐ力にする事も出来ます。 それには、ハンドルを切っているときに急停車しなければならない可能性を考え、自然なバンクを避けてハンドルを切った方と反対側の足を着きながらバンク角 δ が負の値になる様にする、つまり:【図22-k】の「Mr」が図中の「(Mr)」の位置よりも右に来る様に、バンクとは逆方向(カーブの外側)に車体を傾ければ、急停車をしても「残る重力に因る横倒し力」Fgzはカーブの外側方向になるので、「フロント・フォークに因る横倒し力(内側方向)」Fszを打ち消す力になる訳です《→*39》。しかし、これこそ“下手に”見える事を覚悟しなければなりません。 また、「急カーブで急停止」の問題として、「エンスト」の問題が有ります。 民宿限定の旅行で現地に行ってみると良く有る状況ですが、急な上り坂の急カーブでは、あまりスピードを落とすとハンドルを切った状態でエンスト・急停車してしまい極めて危険です。そのときは極力急傾斜を避ける為にカーブの外側を通り《→*39a》、左・右方向で山側の足を着きながら曲がると転ばなくて済みます《坂道の急カーブでは、カーブの後半はスピードが落ちてくるので転倒を防ぐ事を意識しなければなりません》。 第四に、見通しの悪い鋭角の交差点でも、飛び出しの可能性の有る場合には同じ理由でカーブの外側の足を着きながらゆっくりと曲がるのが安全です。 しかし抜本的には、徐行スピードを遅くする《例えば半分の0.5 m/sec (1.8 km/時)以下にする》ことです。そうすればバンク角が1/4以下に小さくなり、傾きに因る横倒し力が1/4になるので、急停車しても倒れません。 また、ゆっくりと停止しても進む距離は小さいので安心です《→*39b》。そうすれば、他車の前で自分が転ぶという最悪の事態を完全に防ぐ事が出来ます。 ↙#j |
*38 この「倒すまいとする力」というのは、バイクの意思ではなく【図22-e】と【図22-j】のバネが出す力とオイル・ダンパーが出す力とを足し算した負のFtf(後輪ロックの場合はFtb)に由るものです。 *39 「徐行中とは言え車体がカーブの内側にバンクしているのだから、カーブの内側の足を着きながら曲がるべきだ」と思いがちですが、そんな事をすると普通に徐行して《バンクして》停車したとき、カーブの内側に転んでしまいます。 何故ならば、「内側の足を着く」という事は内側の足の爪先に力を入れた分だけ、遠心力で決まる自然なバンク角 δ よりも傾き角が大きくなってしまうからです。 *39a 急な上り坂の急カーブでは、カーブの内側の方が距離が短くなる為、外側よりも急傾斜で 且つ急ハンドルになります。 *39b 徐行スピードが0.5m/secのとき停止するまでの時間に0.4秒掛けても、停止するまでの距離は 0.5×0.4/2=0.1m=10㎝ に過ぎません。 この様に1.0m/secと 0.5m/secとでは「量から質への転換」と言える程、劇的な違いです。その為、見通しの悪い急なカーブで絶対転びたくない人は、「0.5m/sec」という速度の感覚を覚えて置くのも一策です。道路の左側に1m間隔の目安を意識し、その目安を2秒間隔で通過する様にしたときの速度が0.5m/secです。 |
| #j また、狭くて鋭角の交差点はなるべく通らない事も必要です。 第五に、車体を山側に倒す為にハンドルを切ってから止まる時には、必ず直進状態になってから、またはハンドルが山側を向く状態になってから停止する。 遠心力を含めた自然のバランス状態で「ハンドルを山側に向けて停車した」という事は、「山側にバンクしている状態で停車した」事ですから谷側に倒れる事はない訳です。 第六に、駐車場を出て直ぐ右の所に坂道の三叉路が在る場合で、その交差点の右側が下り坂で、左側が上り坂になっている場合は、「これは転ぶ場所だ」と思って警戒する必要が有ります。何故ならば、ハンドルはまだ右《谷側》を向いたまま停車しなければならないからです。この場合には車体の前後方向が左の上り坂の方を向いていても直進状態(直立状態)になってから一端停止し、切り返して車体の向きを変える事が必要です。 #k↗ |
#k 問題なのは、最初の停止のとき、まだ運動エネルギーが残っているのにハンドルを右の谷側に向けたまま止まってしまう事です。 その三叉路とは逆に、駐車場を出て直ぐ左の所に、左が下り坂の坂道になっている三叉路が在る場合でも、左の下り坂の方に転倒し易い状況です。そういう悪条件の場所では、上記の様に切り返すか、山側に足を着きながらの「ずるずる」運転がお奨めです。 第七に、前頁で述べた、「踏ん張り棒方式」等の立ち転け防止策を施す《→*40》。しかし、この場合でも傾斜地で谷側方向へ勢いよく倒れてしまっては駄目なので、停止前のスピードを極力小さくする事など、上記の注意が必要です。 下の表は前輪ロックで停止した場合と、後輪ロックで停止した場合で、主な違いを並べてみました。 |
*40 この立ち転け防止策は、倒れ始めたとき、早めに腰を浮かして踏ん張れば、確実に完全転倒を防ぐ事が出来ます。しかし、ハンドルを切った方が下り傾斜で、例えば0.5秒位で腰を浮かし、その後、倒すまいとぜずに踏ん張る事を止めてしまった場合には、完全転倒してしまうかもしれません。 この倒れる速度を計算して、バイクがその慣性力で立ち転け防止策の「踏ん張り棒」を乗り越えて倒れてしまうかどうかを計算してみました。しかし、オイル・ダンパーによるエネルギーの吸収位までは何とか計算出来ますが、重心の正確な位置や踏ん張り棒の剛性など、肝心の倒れるかどうかの決め手になるデータが不足しているので、実地で倒れかかったときの結果に期待する積もりです。 しかし、左記の第一から第六までの注意を守っていれば、転倒実験のチャンスは到来しそうもないと確信しています。ところが、'16年4月、下りで急カーブを切る必要が有ったので、「これは危険な場所だ」と思ったので速度を落とし過ぎ、エンストして谷側に倒れ掛かってしまいました。すかさず倒れ掛かった方の足で踏ん張ったので転倒は免れました《P点のお陰》。傾斜地で車体を立て直すにはバイクを支えながら谷側に両足で立たないといけないので、右のハンドル・グリップには、何時も前ブレーキ用の輪ゴムを付けて置く必要が有ります。上記の注意は全て上述の「◉立ち転けの共通原因」に対する対策です。 |
| 振動の周期 [sec] |
減衰の速さ [sec-1] |
ライダー 抛り上げ高さ [cm] |
0.5秒後の 横倒れ速度 [cm/sec]*41 |
0.5秒後のトータル 横倒し力 [kgw] *41 |
0.5秒後、必要な 引き留め力 [kgw] *41 |
*41 ただし、「必要な引き留め力」については、架空の仮定ですが t=0.5秒以降はFtzなど他の力がゼロで、且、0.1秒間で引き留める場合の計算。また、この【表】の「「0.5秒後の横倒れ速度」と「力」(Ftz,Frz)は全て車体の重心G位置(高さ58.4cm)換算の値《Mr=240kg、車体重量:Mg=180kg、停止する前のスピードV1=1m/sec、キャスター角 26°、ハンドル切り角 25°》。【図22-m】 のグラフの値は全て総重心Mr位置(高さ68cm)での値です。 | |
| 前輪ロックの場合 | Ttf =0.87 | αf =1.59 | Lyf =1.5 | Vtz=31.1 | Ftz=22.27 | Frz=57.17 | |
| 後輪ロックの場合 | Ttb=0.59 | αb =3.7 | Lyb=0.5 | Vtz=29.1 | Ftz=23.92 | Frz=52.40 |
| TOP | ●この頁のTop 数値解析(改訂版) 前輪ロック 車体全体の回転減衰振動 ライダー抛り投げ現象 立ち転けの共通原因 後輪ロックの場合の現象 車体全体の減衰振動 前・後輪ロックの比較 停車時転倒の予防策 ライダー抛り投げ軽減策《??》 足つき性とハンドルの改善 引き起こしの力 完全転倒からの引き起こし |
計算の楽しさと重心の算定 |
| ◉立ちごけ防止策2:雑策 | |||||
| ◎ライダー抛り投げ軽減策《??》 前述の様に転倒を引き留めようとして足を踏ん張って腰を浮かすとシートが伸び上がったり、或いは前輪ロックの場合「回転減衰振動」による「ライダー抛り投げ現象」でシートが急に上昇したりします。その伸び上がる高さを極力小さくする為には、前輪と後輪のサスペンションのバネを、必要以上に伸びさせない方がベターです。 【図23】のグラフは、前(Top)ページのバネの伸びのグラフ【図18】を、右の写真【図24】のピンクの線のリアの伸び制限ベルトや【図25】の「フロント・フォーク伸び制限ベルト」によって、ライダーがシートに跨った直立停車状態から20mm以上には伸びない様に制限したときのグラフです。 しかし、現在私が乗っているバイクは前頁に書いた様に、60kgの体重をシートから完全に浮かせても、車体は20mm以上には伸び上がりません。従って上記ベルトによる伸び制限が、【図23】の様に 20mmならば必要が無い事が分りました《*42》。 もしも、私が一時実施していたときの様に、体重を完全に浮かせたとき、車体が10mmしか浮き上がらない様に調整すると前述の前輪ロックの場合「ライダー放り投げ高さ」が15mm(停止前速度1m/sec時)を5mmだけ小さくする事が出来ますが、それでは効果が少ないので、現在は実施していません。 また、立ちごけ防止策として「踏ん張り棒」などを採用している場合には、P点が路面を擦る程バンクしてしまったとき バネは確実に伸びて欲しいので、バネの伸び制限はしない方が安全です《「踏ん張り棒」等を採用していない場合には、伸び上がり制限の高さ次第では有効です》。 #l |
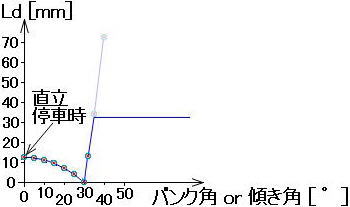 図23 この【図23】のグラフの「バネの伸び制限」の高さを、直立停車時と同程度に低く設定すると、路面を走っているとき尻の骨から「ゴツゴツ」と振動が伝わって来て乗り心地が悪くなります。 *42 伸び制限ベルトが無い場合、車重Mrの慣性力によって過渡的に20mmよりも少し余分に車体は伸び上がります。また、転倒したときにもタイヤは20mmよりも更に最悪60mm出て来るので、バイクを引き起こしづらくなります。従ってそれ等の20mm以上の、不要なバネの伸びを制限する意味では、左記の伸び制限ベルトは有効です。 |
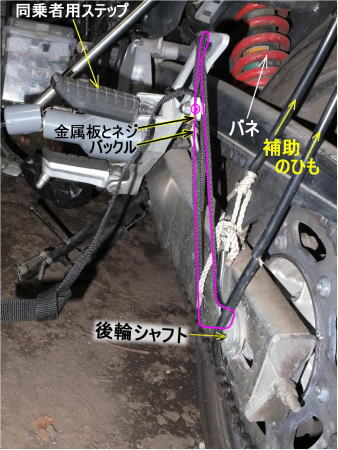 図24 |
|||
 |
| ↑ 図25(最終改造【図26】,【図28】の前の段階) |
| ◎「足つき性」とハンドルの改善 倒れそうになったとき、足を踏ん張り易くする事が必要です。 その「足着き性」を良くする為、【図25】の様にシートの中のクッション材を2cm位の厚さずつ切り取ってシート高を低くしました。図中の「クッション調整袋」はチャック付きの袋に、削ったクッションを入れて、振動を和らげる効果の有る位置に合わせて、マジックテープなどで取り付けています。 また、重いものは極力下の方に有った方が転びそうになったとき踏ん張れるので、「工具袋」《スパナ、予備のネジなどが入っている》は現在、バンパーの水平部分《車体の最下部》に付けています。 また、バイク店に頼んで前輪・後輪とも、サスペンションの高さを変え、シート高が最低になる様にしました。 ハンドルを高いものに取り替えたのも、転びそうになって踏ん張るとき梃子(てこ)の原理で有利です。 左右方向に傾斜が付いた地面でその谷側に倒れそうになったとき、足が着くまでに僅かながら時間が掛かってしまい、その間に慣性力《倒れる勢い》が大きくなってしまいます。 その意味でも「足着き性」を良くして早めに路面に足を着いて踏ん張れば、「踏ん張り棒」の先端が着地する前の運動エネルギーが小さくなり、完全転倒を防ぐことが出来ます。 しかし、左右方向に急傾斜で下り方向に転びそうになったときには大怪我を避ける為、直ぐに逃げるべきです。 |
 図26 ↑ 右側アラーム |
||||
| ◉関連する改造 | |||||
| ◎ハンドル・バンパーと後部バンパー 多少の傾斜が有っても「踏ん張り棒」の先端Pが着地して安定して「立っている」為には、そのP点の前後関係の位置は極力重心の近くになければなりません。そしてTOPページの【図10】の下で計算した様に、P点に掛かる力 Fp は 133kgw 《推測データを含む》という大きな力なので、左右が繋がった頑丈なバンパーの力を借りなければなりません。 ということはバンパーの水平部分はエンジンの下を通さなければならず、バンパー自体が低い位置に取り付けられる事になります。傾斜地で下の方に急に転倒するとき《例えば右側に倒れる場合》、倒れる過程で、【図21-d】の左下の*0に書いておいた現象と同じで、前輪の接地点Cが地面からの力を受けて、ハンドルは自ら(みずから)強い力で右回転しながら倒れます。ということは、ブレーキ・レバーの先端が先に着地するので、レバーを【図35a】の様にUの字形に折り曲げながら着地します《停車直後に転倒する場合》。 その為ハンドルは更に下を向いてバックミラーも壊れてしまいますが、これはメインのバンパーを車体の低い位置に取り付けた事に因り車体は 90°以上に倒れて、ハンドルなど車体の上部がその重力をより多く受ける事になった為です。 更に深刻な事には、交通事故等で瞬間的に倒される場合、その速さ次第で膝または踝の関節が潰される可能性も有ります。そこで、車体上部にもバンパー《バイク店が「ハンドル・バンパー」と命名》が必要になってきます。 【図27】に画かれた橙色の線はそのバンパーの一部で、三角形の補強構造になっています。灰色のビニール・パイプ《内径Φ13》は、専ら路面からの力を受け止める役割をしていますが、事故で路面に勢いよく倒れたときもしっかりと役目を果たし、事故の後も交換していません。 そのパイプが曲がらない様にする為の、それと平行している通しパイプは、事故後Φ19の、オール・ステンレス・パイプに取り替えたものです。 車体後部にも、【図28】の中のQを先端とする「後部バンパー」を設けています。これが無いと完全転倒時に、リア(後ろ)・ウィンカー取付金具が曲がってしまいます。これもいざという時にはライダーの足を護ってくれています。 タイヤの接地点C,Dと踏ん張り棒の先端Pcの3点で 34°位(実測37.5°)傾いて「立っている」とき、更にバイクを倒そうとする力を加えると、前輪が浮き、線分PcDを回転軸にして更に傾き、Gから地面に下ろした垂線の位置Gh《Top頁の【図9c】のGh》が、その時の回転軸PcDに対して直角に近づき始め、線分PcDを越えると、その時点からは逆にバイク自身が徐々に大きな力で倒れ込み、Q点が接地して接地面は三角形PcDQとなります。 Qが接地する頃には、そのときの地面に Gから下ろした垂線の位置Ghは、【図9b】の様に接地面の線分PcQを既に越えている為、このPcDQ接地は安定なものではなく、今度は線分PcQを回転軸として、「ハンドル・バンパー」の先端《Rとします》が接地するまで倒れます。 上記の37.5°傾いて「立っている」ときから、更にバイクを倒そうとしたときの、“車体が傾く角度”と、“路面から重心までの高さ”との関係のグラフ【図29】は削除し、正確に計算しなおしたグラフを次頁の「バイク引き起こしの力」の【図40】に載せておきました。 |
 図27 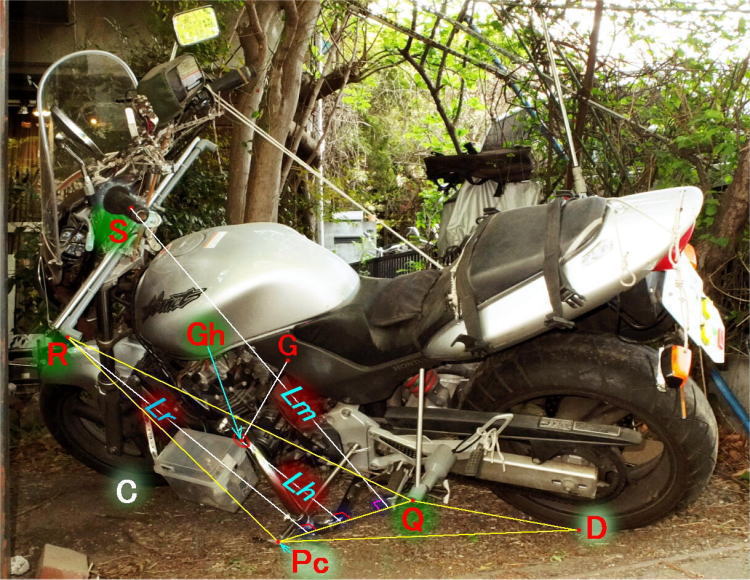 図28 |
||||
| ◉引き起こしの力 上記ハンドル・バンパーのRが着地している「完全転倒」状態から直立させるまでの段階で、【図28】の線分PcQ,PcD,CDの順に引き起こしの回転軸が移っていきます。 ここで、その引き起こしの各段階でのバイクを引き起こそうとする力《これはバイクが倒れようとする力に耐える力と同じ》を計算する方法を、線分PcQが回転軸になっている場合を例にして述べます。 いま、左に完全転倒して【図28】の三角形PcQRが接地している状態からハンドルの左グリップSを両手で握って力を入れ、ハンドル・バンパーのR点を地面から浮せると、重心Gから“地面”(水平だとします)に下ろした垂線の位置Ghから回転軸PcQまでの距離を【図28】の様にLh とし、ハンドル・グリップSから回転軸PcQまでの距離をLm とすると、引き起こすのに必要な力《Fs とします》は Fs=M*g*Lh/Lm (8) となります《式の中の“g”は重力の加速度 9.8 m/sec2 ですが、“M*g”を180kgw とすれば、そのまま Fs はkgw の単位で答えが出ます》。 この完全転倒からの引き起こしのとき、【図28】を見ても分かる様にハンドルを上向きにした方が《車体が左に倒れているのでハンドルを右に向けた方が》 Lm が大きくなるので、(8)式の Fs が小さくなって有利である事が分ります。 また、このときの力を加える方向は真上ではなく、PcQを回転軸として回転させる方向、つまり、PcQを回転軸とする円の、点Sでの接線方向に力を加えるのが有利です。《→*44》 タイヤの接地線分CDを回転軸にして「Pc点立ち」からの引き起こしに関してはTopページの【図9a】の下に書いてある方法が楽に起こせます。 また、引き起こしのときハンドルを上向きにした方が有利である理由について、上記「Lmが大きくなる」以外にもう一つの理由がTopページの最後の注*18に、書いて有ります。 バイクが直立状態から左に倒れ始めたとき、Pcが着地して安定する筈ですが、もしも倒れる過程でエネルギーのロスが無いとすれば、運動エネルギーによってバイクは転がり続けます。ところが、それを防ぐ力はライダーが「倒すまい」として踏ん張る力の他に、サスペンションの中のオイル・ダンパーの制動力が有ります。 それはPcが着地する前はサスペンションが伸びようとするのに抵抗し《油の粘性が実際に力を出す》、Pcが着地後もタイヤが浮きそうになる程サスペンションが伸びようとするのに抵抗して、倒れる運動エネルギーを吸収してくれます。 このオイル・ダンパーは、立ちごけ程度の速くない転び方のときには有効ですが、ダンパーの中のオイルが流れる時間を必要とする為、事故などで瞬間的に倒れてしまうときには余り効果が有りません。 それとは逆に、車体の部品の変形については、ゆっくりとした転倒では部品が変形しないのでエネルギーの吸収は有りませんが、衝撃的な速い転倒に対しては次の実例の様に部品が変形し、運動エネルギーが吸収されます。 後部バンパーの先端Qのキャップを取ると【図32】の様にステンレスの6ミリのネジが見えますが、このネジ(ボルト)が事故の時にはグニャリと曲がっていました《→*45》。プライヤーという工具で直ぐに元通りになったので、こういう弱い部分を作っておいて衝撃的な大きな力のエネルギーを吸収するのも良策だと思いました。 バイクをハンドルで支えながら徐々に倒す場合には、上述の引き起こしの回転軸:PcQ,PcD,CDとは逆の順番で、【図34】の様にバイクが倒れていきますが、このとき特にハンドルが下を向いている場合には、力を入れるグリップ《【図28】のR》が 回転軸に近くなるので、ハンドルで車体を支えるのに非常に大きな力を必要とし、また地面と車体との間の隙間も少なくなるので、非常に危険です。気軽に【図34】の転倒過程を確認しようとするのは止めた方が良いでしょう。 また、事故などで真横に勢いよく倒れる場合には上記の回転軸の移動の様な複雑な倒れ方はしません。線分CDを回転軸にしてPcが接地する迄は同じですが、そこからは先ず前輪Cと後輪Dがほぼ同時に浮いて、Pcの1点を中心に回転し《→*46》、後部バンパーのQとハンドル・バンパーのRがほぼ同時に着地し、完全に倒れた状態になります。 |
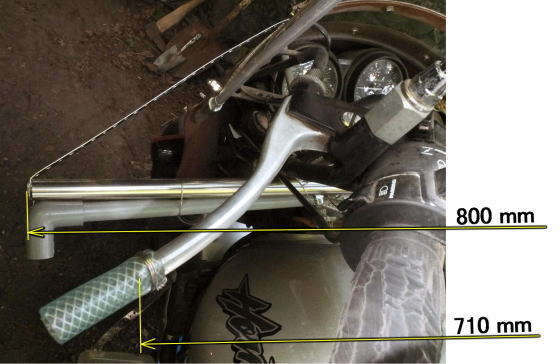 図30  図31  図32 |
*44 路上で転んでしまった場合、兎角、真上《天頂》の方向に持ち上げようとしがちなのですが、これは気も転倒している為です。それに、道路上で転んでしまった場合など、多くの人の注目を浴びている時には「火事場の馬鹿力」が出るものです。 私が高速道路で転んだときには、全車両が停止して全員私の目を見ていました。その注目の中、急いで、飛び散ったサイド・トランクの蓋や荷物を路肩に拾い集め、最後に左に転んでいた400ccの車体を起こしたのですが勢い余って反対側に倒してしまいました。 見ていた人は「何で車体を裏返すんだろう」と思ったのではないかと思います。 *45 普段は【図28】や【図25】の様にキャップを被せています。 また、鉄ネジの方が折れやすく、折れてしまった直後にはエネルギー吸収の作用は有りません。従って、この場合にはステンレスがお勧めです。 ただ、ステンレスのネジはナットの中心軸に対して左右非対称に強い力が加わる場合、つまり締め付けられる面が傾いている状態で強い力で締めると、ボルトとナットが溶着した様になってしまい、ボルトとナットは一体となって、ネジを緩めることは不可能になります。 【図30】は「ハンドル・バンパー」の幅と、クラッチ・レバーの金属端を切った幅を示しています。 針金で縛ってある部分は鑢(やすり)で括(くびれ)を作り、チューブが抜けない様にしています。 *46 車体の重心Gは、真後ろから見てほぼPcを中心とした単純な円を描いて倒れます。 【図32】の後部バンパーのΦ13 のステンレス・パイプのバイク本体側は、バイクのフレームで力を受け止めています。しかし事故などで、【図28】のPc点を中心に横倒し回転するときには着地面PcQR はほゞ水平になって着地する為、力は主に【図32】の6ミリのネジと水道用の変換パイプが力を受けます。 |
| ●完全転倒からの引き起こし | |||||
| この立ち転け防止策を施したバイクは、引き起こしのいずれの段階でも、何も対策をしない標準のバイクに比べて引き起こす力は小さくて済みます。 何故ならば、普通のバイクが倒れたときは、タイヤの接地点C,Dを回転軸として引き起こすので、ホンダのホーネットを例にとると、ライダー及び同乗者のステップの取り付け部分が接地して凡そ 71.6°傾き《→*47》、そのときのLh は凡そ55cmという大きな値《推測値》になりますが、本改造では、“重心に近い接地点”《踏ん張り棒のPc点と後部バンパーのQ点》の存在によって、重心Gからの地面に対する垂線の位置Ghと回転軸:PcD,PcQとの間の距離Lh が小さくなる(30cm台になる)為です《正確な計算は次ページ》。 「Pc点立ち」から車体を引き起こす場合には、バイク本体が34°位《後の正確な実測値は37.5°》しか傾かないので、傾き角が標準品に比べて小さく、引き起こしに要する力は sin37.5°/sin71.6°=64.2% 位の小さい力で済みます《概略値。ハンドルの高さを変えない場合》。 加えて、前述《*36》に書いた様にハンドル《右図ではR》の高さを大幅に高くしているので、回転軸から力を加える点《R》までの距離(Lm)が大きくなっていて、引き起こしの力は更に小さくなっています。 【図34】の黄色の線分は、引き起こしの各段階における回転軸を示しています《車体の重心Gは推定位置》。水色の細い線は、それぞれの接地面:CDPc,PcDQ,PcQR《延長面を含む》の面上に画いたGhの移動軌跡を、バイク中心面に投影したものです《→*47a》。 しかし、完全に《90°位に》倒れてしまったとき、ハンドルを上に向けても引き起こせない場合には、奥の手を使います。 ただし、以下の小さな文字の部分の「奥の手」については、更に改善した最後の頁の「バイク引き起こしの力」の方をご覧になって頂きたいと思います。 先ずΦ16のパイプの一部に【図33】の様にロープを巻き付けて、【図35】の様にΦ25のパイプに継ぎ足したとき、2本のパイプに局所的に大きな力が加わらない様にします《ロープはクッションの役目》。ただし、上記 最後の頁の改善で、Φ25パイプはΦ19で済むので【図33】のクッションは必要なくなりました。 【図36】は、【図35】の様に左側に転倒して下になった方の(左の)ハンドル《【図36】の中のピンクの点線》のグリップに近いAの部分を、Φ25のパイプの極力図の上部から図の上の赤線の様に引っ張り、そして、上になった方のハンドルの付け根部分BをΦ25パイプの下端で引っ張る様に、予め結んであるロープ(図の下の赤の線)にパイプを通します。 そのΦ25のパイプに2箇所の引っ張る部分を作る訳ですが、その2箇所の間隔が狭いと梃子の原理で非常に大きな力がパイプに加わり、パイプが曲がってしまいます。 そしてロープが、パイプに結んだ位置から ずれてしまうと危険でもあるので、Φ25のパイプの2箇所には、片面粘着のスポンジ・ゴムを貼っておき、不織の紙テープで補強しておくと安心です。 また、ここでもオール・ステンレスパイプでないとパイプに皺がよってパイプが曲がってしまいます。このとき、自分が出せる力に余裕が有れば、Φ16のパイプの半分位の長さの部分に力を入れた方がΦ16のパイプは曲がりにくくなります。 この引き起こしの実験は我が家の庭で実験済みです。しかし、路上で倒されてしまった場合はこの手法は許されません。事故の加害者の他、自転車で通りかかった女性までが、パイプ無しの引き起こしに協力してくれるからです。 それでも私はこのパイプ2本を常時バイクに取り付けています。田舎の徐々に狭くなった坂道で、退き返す為にバイクを逆方向に向けるのは不可能です《バイクにはバック・ギアが無いので坂の上の方には切り返せない為》。しかし、このパイプが有ればバイクを倒し、【図34】のQPcRの3点で接地しているバイクを、浮いたタイヤでこじる様にして方向転換をする事が可能です。 |
 図33 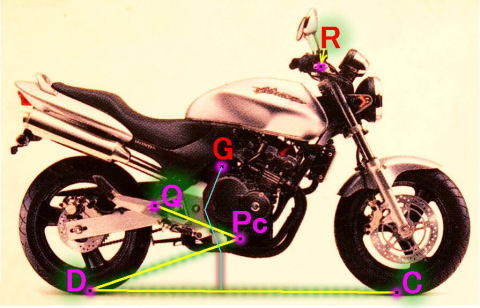 図34(標準品) |
*47 車体が72°くらい傾いた場合は後輪はタイヤの側面が接地点Dとなります。また、車体を引き起こすのにはハンドルを上に向けた方が有利なので、その通りにしています。 サスペンションは両輪とも55mm程度タイヤが出ていると仮定します。 *47a 【図34】の黄色い線分に対して垂直な水色の細い線が、その黄色い線分を回転軸にしているときのGhの軌跡です。 初めにCDで接地していた直立状態から徐々にバイクを倒すと、点Pcが着地するまで、Ghは線分DCから垂直に離れ、そのときのGhの軌跡が水色の線となります。 次の折れ曲がり迄の水色の直線《に近い線》が PcDを回転軸にしているときのGhの軌跡です。 最後のG迄の水色の直線が、PcQを回転軸にしているときのGhの軌跡です。 この図を寸法入りで正確に画いたものが、最後のページの「バイク引き起こしの力」の【図39-a~d】です。 |
|||
 図35  図35a この図の説明は【図27】の左 |
|||||
 図36 このページの終わり 。 |
| TOP | ●この頁のTop 数値解析(改訂版) 前輪ロック 車体全体の回転減衰振動 ライダー抛り投げ現象 立ち転けの共通原因 後輪ロックの場合の現象 車体全体の減衰振動 前・後輪ロックの比較 停車時転倒の予防策 ライダー抛り投げ軽減策《??》 足つき性とハンドルの改善 引き起こしの力 完全転倒からの引き起こし |
計算の楽しさと重心の算定 |