| このHPのTOP | 徐行・停止時の落とし穴 | ●計算の楽しみと重心の算定 バイク引き起こしの力 重心の算定 真のバンク角と見掛けのバンク角 アインシュタイン 起き上がりこぼしバイク 立ち転けの可能性 立ち転け無しバイク 改良型前輪タイヤ 横倒れの計算 あとがき |
| |
|
| 作成’14.8.21 改訂’18.10.1 |
計算することの喜び
| 蜃気楼の寸法 | 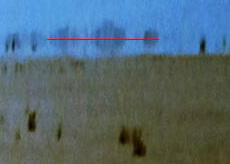  図37 図37a 上下方向を拡大していない原画 下の「水平線の曲がり具合」の中に、海面から20[m]の高さから見た水平線は16[km]の彼方であることが書いて有りますが、同じ高さから見た地平線も同じ距離に在ります。砂漠の中の丘がそれよりも近い所に在れば、写った逆像は左記の2分の1ほどに小さくなりません。それは、琵琶湖程度の湖に写った向こう岸の丘は実像と大きくは違わないのと同じです《ただし、水面反射の場合には波が有るので向こう岸の“低い”丘は写りませんが・・・》。また、16[km]の所に在る数千[m]の高い山の場合には水面に写りますが、湖面から20[m]の高さから見ても写った山は2分の1ほどに「低く」はありません。その山の低い部分が水平線近くに写ったとすれば その像については2分の1になりますが、その山の高い部分については近くの湖面に写るので2分の1にはならない為です。 |
||
| 嘗て砂漠を旅行したとき、地平線上の山(?)が地表の熱い空気層に反射して山が逆さまに写り、その下に空も写っていました。 この空が写っているのは「逃げ水」とも言われています。これは一種の蜃気楼ですが、その写った逆さまの山はどう見ても実像《実の地平線である赤線の上》の山よりも「低くかった」ので計算してみました。 するとその寸法比は丁度2分の1でした。右の写真【図37】は上下方向を拡大・強調していて、赤い水平線は私が画いたものですが、地平線までの地面が地球の理想的な球面ではない為、海の場合ほど完全な比率にはなっていません。しかし、この類のTV映像を見る度に「ウーン、私が計算した通りだ」と思っています。 |
|||
| 水平線の曲がり具合 | 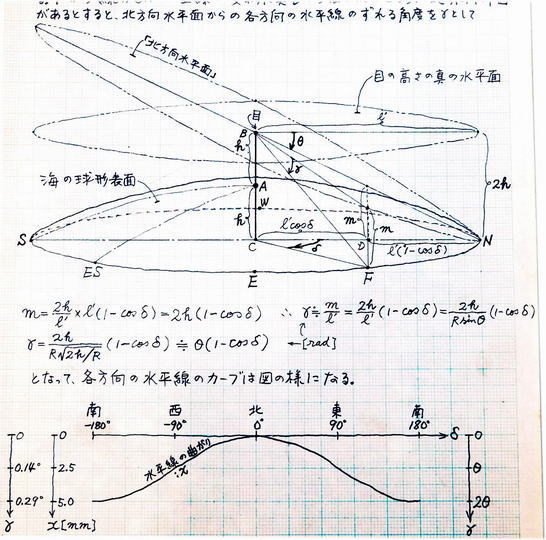 図38 |
*1 勿論北の海だけが膨らんで見える訳ではなく、観察者が西を向いて西の海面を見てみると、水平面の感覚は「西方向水平面」にとって替わり、そのとき西の海面は北と南の海面に比べれば高く見えます。 その「西方向水平面」に合わせた真っ平らな円盤の中央に穴を開け、小さな鏡を東西南北方向に回転させると、東の水平線は北と南の海面に比べて2倍だけ低く見えます。 その「半径1m の真っ平らな円盤というのは非現実的だ」と仰る方には、長い水準器がお勧めです。一番長い水準器は1.2m のものが有る様ですが、それを海面から20m の高さの所に東西方向に水平に固定して西側の端から東の海面を見ると、海面は水準器の東端から(2.5*1.2=)3㎜ だけ低いところに在ります。ただし、東西南北どっちの方向も水平に固定された水準器の端からは「低く」見えます。これは「真の水平面」からの、各方面の水平線の「低さ」は【図38】の様に一定(2*h)なので当然です。 クイズ では、歪のない理想的な標準レンズのカメラを完全に水平に向け、どの方向も「低さ」が同じ水平線を写真に撮ったら水平線は真っ直ぐなのでしょうか? 答え ・・・写真はフィルムと平行な面《ピントが合う位置の カメラの光軸と直角な面》を忠実に写し取ることを考え、作図してみると分かります。やはり、水平線は曲がって写ります。これは、カメラを「完全に水平に」向けなくても同じです。 左の図で、R を地球の半径(4万㎞/2π)、高さh (0.02㎞)から海面が見える限界の距離を l'とすると l'=SQR(2*h *R) =16.0km 。 |
||||
| 人工衛星の高さから見た映像では確かに「地球は丸い」と思える位、「水平線」は曲がっています。 したがって、海面から20[m]の高さの位置から四方の海を見渡した場合でも水平線は何らかの曲がりを呈している筈だと思い、計算してみました。 海面は半径6,370[km]の球面《1周4万[km]》で盛り上がっているので、足元の海面位置《【図38】のA点》から20[m]の高さ《 h [m]とします》のB点から遠くを見たとき、計算してみると16.0[km]以上遠くの海面は、水平線の向こうになるので見えません。 そのぎりぎりの距離の東・西・南・北の地点を、図中のそれぞれE・W・S・Nとし、その地点を繋ぐ円の「高さ」でスライスした図が同図で、これは旅行中 計算して画いたものです。そのE・W・S・Nの「高さ」からのA点の海面の盛り上がりは、計算してみると、図の様に海面からの高さ h と同じ値になります《ただし、高さ h は船の甲板の様に、上記半径よりも充分小さいものとします》。 つまり、目の位置をB点にして北のN点を見ている人は2*h だけ高い所からN点を見下ろしている事になります。従ってその人にとっての真の水平面は北の水平線地点:Nの上空 2*h の高さに浮かんでいる面なのですが、北を見ている人には飽くまでN点に於ける接線が水平線としか見えません。その接線と自分の目を含む面を図の様に「北方向水平面」と呼ぶことにすると、その「北方向水平面」からの各方向《E,S,W方向》の海面の“ずれ”は、角度で言うと図中の γ 《真横のE,W方向は0.14°》となります。 0.14°と言うと余りにも小さくて人間には分らないと思うかもしれませんが、半径1[m]の真っ平らな円盤を上記「北方向水平面」に合わせて固定すると、東の海面と西の海面は、その円盤の最外周からなんと2.5[mm]も低い位置に在るのです《眼球の水晶体が図中のB点(円盤中央)に来る様にしたときの値》。 つまり、海面20[m]程度の高さでも、真っ直ぐな「水平線」と思われがちの海面は図中の x [mm]の様に、「サイン・カーブ」と呼ばれているカーブで曲がっているのです《→*1》。 |
||||||
| 1.バイク引き起こしの力 |
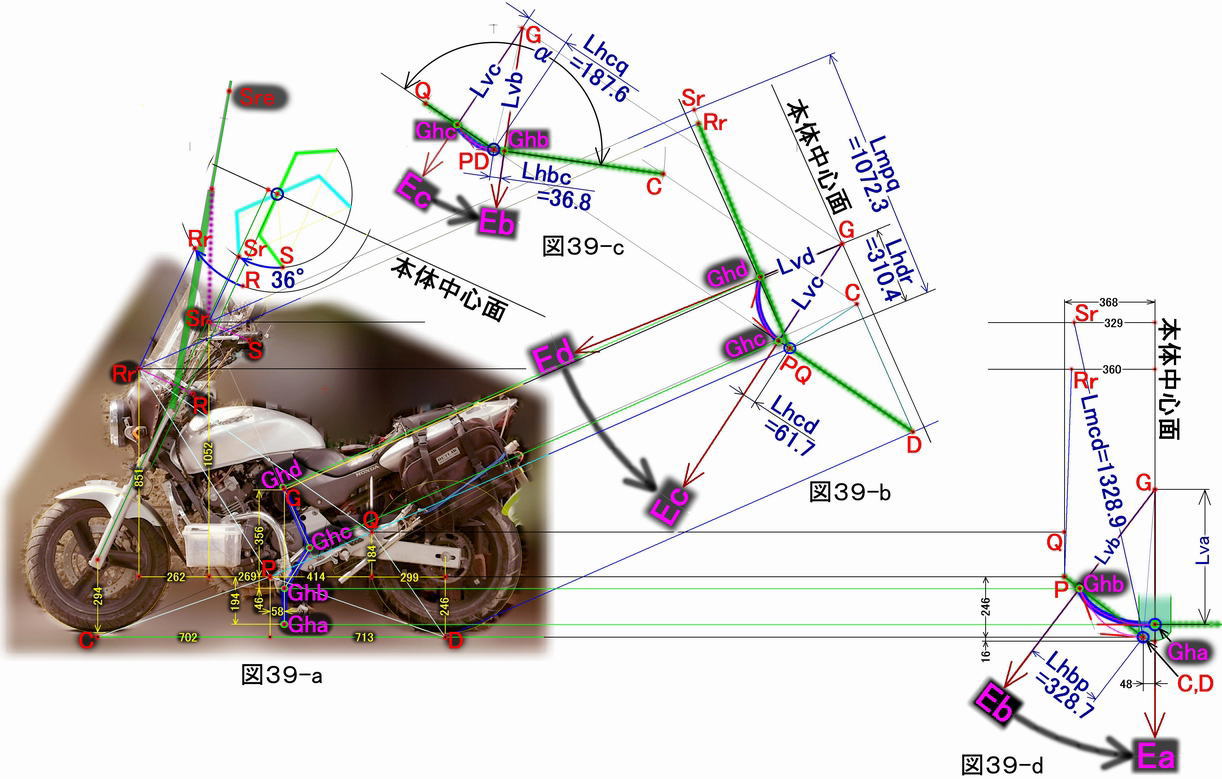 |
| 前の頁と同様、この段階ではバイクの重心Gの位置(高さ)は 推定によるものですが、計算を 引き起こしの3段階《①~③》に分けて計算しています《前輪と後輪のタイヤ幅方向の曲率半径も計算に入れています》《→*2》。 |
*2 前輪と後輪の現物の曲率半径は 61.5mm と 93.3mm なので、車体の重心Gの前後方向の位置に於ける、『2つのタイヤによる実効曲率半径』は【図39-a】の寸法から計算すれば 〔61.5*(713-58)+93.3*(702+58)〕/(702+713)=78.6㎜ となりますが、78.3㎜ のままとします。 P点の、バイク本体中心面からの距離が368mmであり、「P点立ち」のとき本体中心面の傾き角が37.5°になった事から、「P点立ち」状態のとき、バイク本体中心面に対して直角な遠方から《地面の中から》見たときのP点とCDとの位置関係は、【図39-d】の様に (368-78.3*sin37.5)*tan37.5 =245.80≒246 。 Q点の、本体中心面からの距離はP点と同じ(368mm)。 |
||||
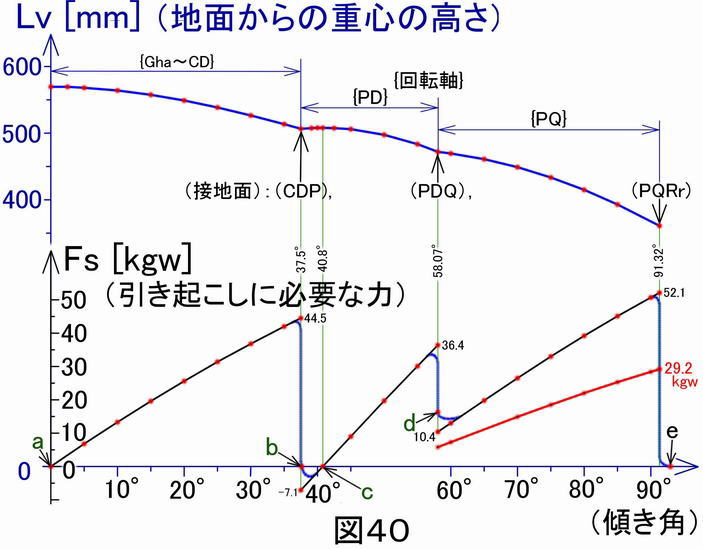
| 【図39-a】は、三角形CDPを接地面にして左に傾いて立っている場合《「P点立ち」》のバイクを、車体中心面と直角の方向から《地面の中から》見た図です。引き起こしにはハンドルを右一杯に(仕様:36°)回して引き起こすのが有利なので、そのときの左のハンドル・グリップ《図中のSr》に力を入れる計算をしています。 しかし、ハンドルを右に36°回した事によって、引き起こしの回転軸である線分CDが、重心から地面へ下ろした垂線の足Ghに近づく事は計算されていません。その点では「P点立ち」からの引き起こしについてはやゝ不正確です。 しかし、それを計算に入れると引き起こしの力は小さくなるという事と、「P点立ち」からの“引き起こし”の場合にはガソリン・タンクの上部に腰を当て、“押し起こす”と非常に楽に起こせるので、その補正計算は重要ではないと考え、行なっていません。 また、「P点立ち」からの引き起こしのとき 計算では接地線分CDを「回転軸」としていますが、正確には線分CDは回転軸ではなく、タイヤが地面を横方向に「転がる」事によって、引き起こしの力が少し小さくて済む《↘*3》のですが、それも同じ理由で計算されていません。 ① 完全に転倒してしまった場合には【図39-b】の緑の線:PQRrで示したの面で接地しています。その状態から上記Sr に力を入れ、PQを回転軸《図中の青の○印》にして引き起こしていくと、やがて後輪の接地点D点が着地し、同図の緑:PQDで示した面が接地面となります。 その間、重心Gの地面からの高さ《Lv とします》は同図の Lvd から Lvc に変わり(高くなり)、Gから地面に下ろした垂線の足Ghは同図のGhdからGhcに、青い太線のカーブを描いて移動します《→*3a》。すると、そのとき地球の重心をEdからEc(の方向)に移動させた事になります。 前頁の「引き起こしの力」の、【図28】の Lh 《Ghと回転軸PQとの間の距離》の値は、引き起こし初めのときが【図39-b】の中のLhdr ,Dが着地する直前の Lh の値が同 Lhcd となります《→*4》。前頁の《「引き起こしの力」の中の》計算式(8)の文字 M*g を Fgo 《車体のみの重力とします》に替えて再び書くと、引き起こしの力 Fs は Fs=Fgo*Lh/Lm 。 (1) 上記 Lh の値、及び、回転軸PQとSrとの間の距離として【図39-b】の Lmpq の値を、(1)式のそれぞれ Lh 及び Lm に代入すると、点Srが円を描く方向《その円の接線方向》に力を加えた場合の引き起こし力:Fs を計算する事が出来ます《結果は【図40】の中の回転軸を{PQ}にしている区間。その区間の赤い線に付いては後述》。 ② 同様にして回転軸をPDにして引き起こすときの図が【図39-c】です。Qが接地していた状態から車体を起こして重心Gが回転軸PDの真上に来たとき《【図40】の「(傾き角)」が「40.8°」のとき》【図40】の上の青線の様にLvは極大《その辺りでの最大値》となり、それ以降は車体自ら「起き上がって」《傾き角が小さくなって》、前輪のC点が着地し、同図 b点の「P点立ち」となって安定します。その間、Ghの軌跡(青の太線)は、GhcからPDを通過してGhbにまで《図では明確ではありませんが》達します。 そのとき、地球の重心を【図39-c】の様にEcからEbに移動させた事になります。《↘*4a》 引き起こしの力を計算するには、Lh として、Qが地面から離れた直後には【図39-c】の Lhcq を使い、Cが着地する直前には -Lhbc の値を使います。Lh が負の値になるのは、Gからの垂線の足Ghが、支点の線分PDを超えて、それまでとは反対側《起こそうとする力を入れる点(Sr)とは反対側》に行ってしまうからです。 回転軸PDとSrとの間の距離 Lm は、図には書いて ↗ |
 |
|||||
| 有りませんが、表《↘*5》の中の値({回転軸PD}Lm=)929.05[mm]を使います。 ③ 「P点立ち」の状態から車体を引き起こすと最初のうちは【図39-d】のCDを回転軸としてバイクは引き起こされますが、そのとき車体が直立するのにつれてサスペンションには車輪重量(後述24kgw)を除いた車体本体重量156kgwが次第に100%かかってくるので後述の (Ltp-Ltj=)45.0[mm] だけバネが縮む“等”しながら、車体が直立するのにつれ最終的に図中のGhaを回転軸として車体が引き起こされます《【図39-a】のP点付近の寸法「194」は(246-45+16=)「217」に訂正します》。従って、「傾き角」が37.5~0°の区間は、【図39-d】の中の○印CDを回転軸にしたときの計算定数《次に述べる(2)式(↓)のLr 及び(3)式のLm 》 と、同図の○印Ghaを回転軸にしたときの計算定数《同》を、傾き角に対応して徐々に入れ替えています《一種の簡易計算です》《サスペンションの縮みの正確な計算は後述》《重心位置やバンク可能角などを計算するには後述の「アインシュタイン」の部分で行なっている様に、車輪の重力を別扱いにした計算をする必要が有りますが、次の計算の仮定として「P点立ち」状態から更にバイクが倒れたとき車輪の位置は動かない」として引き起こしの力Fs を計算しているので、車輪込みの扱いでOKです》。 以上の各段階、つまり回転軸(支点軸)を、それぞれPQ,PD,CD,GhaにしたときのLh について総括的に述べます。 各段階の回転軸と重心Gとの間の距離を『Lr』 とし《Lr は引き起こしの各段階での定数です》、Gがその回転軸の真上にある状態からの引き起こし回転角度《各回転軸の延長点から見た角度》を『ε』とすると、 Lh=Lr *sin ε (2) であるので、引き起こし力Fs は Fs=Fgo*Lr *sin ε/Lm (3) となります《↓*5 の表を使えばFs の値が得られます》。 ↙ |
↑【図40】の値について 後述の重心位置の実測計算により重心が推定位置よりも低くなることに加え、引き起こしの力を加えることによるバネの縮みを計算に入れると、b点の上の44.5kgw は36.67 *3 極端な例えですが、【図39-d】のP点立ちに於いて注《*2》で計算した2つのタイヤによる実効曲率半径 Rt が、もしも図中の Lvb と同じ値であるならば《つまり、上記曲率半径の中心が、重心Gの位置に来る様な太いタイヤのバイクを作るならば》、タイヤが転がる効果に因って「P点立ち」からの引き起こしに要する力はゼロとなります。更に車体を引き起こしていくとバネが縮み重心の高さが低くなるので、引き起こしに要する力は負の値となって「起き上がりこぼし」の様に直立状態で安定します(スタンド不用。ただしカーブ走行はやゝ低速に限定)。 *3a 【図39-b】などの中の、点GhdとGhcから出ている短い赤い線はGhの移動軌跡の接線です。 *4 回転軸PQとかPDは、【図39-a】と【図39-d】で座標の数値が分っている「縦、横、高さ」の直交座標に対して斜めになっています。 そういう場合に【図39-b,c,d】の中の Lh や Lm を求めるには、【図41】の様に例えば重心Gの点を含む三角形を考え、その直交座標(x,y,z)の数値から、斜めの3辺のそれぞれの長さ:SQR(x2+y2+z2) を求め、次の定理で角度を求めます。すると、回転軸からの距離や垂線の足Ghの位置などが求められます。 余弦第二定理:辺の長さが a,b,c の三角形の、a,b の 2辺に挟まれる角度 θc は θc=cos-1[(a2+b2-c2)/(2*a*b)] 。 ピタゴラスの定理の延長の様なもので、必要なのは根気だけ。【図41】の様な図を画いて、次々に数値を書き入れていけば良いのです。ただし、【図39-a~d】は車体の左側について画いていますが、【図41】は右側の各点の図です。 |
|||||
| つまり、力 Fs は回転角 ε に対してサイン・カーブとなります。 この【図40】で、車体が安定しているのは b点と e点だけです。 「引き起こしに必要な力」というのは、バイク自身が「倒れようとする力」と全く同じです《ともに力を入れる Sr点に換算》。 従って、b点の左側では勿論 倒れようとする力が正なので傾き角が増えていきますが、b点を通り過ぎると Fs が負の値となり、バイクが b点に戻ろうし、結局 b点で安定します《→*6》。 【図40】では c点の左と右でも Fs の極性が反転しますが、c点の場合にはバイクから手を離すとバイクは b点に戻るか、或いは逆に完全転倒の e点に行ってしまいます。それは、バイクが直立している a点でハンドルから手を離すと左・右どちらかに倒れてしまうのと同じです《 a点からは、「P点立ち」で止まるか、あるいは、路面が極めて硬い場合などでは慣性力で e点まで行ってしまうかもしれません》。 【図40】の横軸の「(傾き角)」については、直立状態から「P点立ち」の37.5°までは真後ろから見たそのままの角度です。しかし、回転軸を{PQ}とする範囲の「(傾き角)」は、回転軸PQの延長点から見た回転角です。ただし、車体中心面が水平になっている状態を「90°」として目盛っています。 更に、回転軸を{PD}とする範囲の角度は、回転軸PDの延長点《地面の中》から見た角度ですが、その角度範囲の両端(はし)の角度を無理矢理、「P点立ち」の角度37.5°、及び上記 線分PQを回転軸にしたときの角度の測り方でPDQ面接地のときの目盛58.07°に当て嵌めたものです。 また、【図40】の b点(「P点立ち」)より傾き角が大きい範囲では、前輪も後輪も「P点立ち」の位置からは動かない(バネが伸びない)として計算しています。その結果が、図中の、黒い線の Fs が不連続になっているグラフです。しかし、実際にはFs の値が不連続に変化する事はなく、青線の様に「丸み」と急な傾斜とで繋がります《↘*7》。 赤道付近の観光地で、「赤道の北《「赤道」からちょっと歩いた程度の所》では洗面器の水が右回りになり、赤道の南では左回りになる」という“実験”をして見せたガイドがいる様ですが、それはインチキです。 上記【図40】に不連続点が存在しないのと同様、電子レベル以下の微細な世界以外でディジタル的に量が変化する事は“普通は”在りません《ポジティヴ・フィードバックが架かっている様な場合は別です》。 地球の半径規模の大きな海流では上記の通りになりますが、局所的に回転している場所で起こる現象は、地球の自転とは関係有りません。北半球の海流でも、大きな海流の隣の小さな海流では、大きな海流によって回される力の方が、地球の自転に伴う力《「コリオリの力」》よりも大きいので逆(左)回転をしています。しかも、赤道付近はその力が、地球上で最も小さい《測定不可能》場所なのです。つまり、その力は回転する面《地球を赤道で輪切りにした面》“の方向に動くもの”に対して働くので、その面《赤道断面》と直角な、“赤道付近の水平面”で動くもの《水流》に対しては、コリオリの力はゼロなのです。赤道を境界にしてちょっと北に行ったからと言って「ここは北半球の物理現象となる」とディジタル的に考えるのは誤りであり、その場所の緯度を ε とし、水平方向に動く速度を V とすると、コリオリの力は V*sin ε に比例するので、赤道から北極か南極に近づくのに従ってゼロからアナログ的に増えていきます。 しかし、極地に行ってさえも洗面器程度の水の回転方向は、その注ぎ方で決まるか、或いは洗面器の底に穴を開けた場合には最後に水をどっちに動かすかの、一見 作意の無い動作で決まります。 この様に物事を量(数値)と質の両面から見ると、インチキを見破る能力が身に付きます。そこで、クイズを2問ほど。 数学クイズ① 【図39-a】の三角形PDQとPDCの面がなす角度《【図39-c】の α 》を計算しましょう。答えは154.2°ですが、問題はそれを求める過程です。答えが4桁以上の数値で合っていれば解き方も正解です。 一つの方法として、その2つ面と重心Gとの位置関係から計算する方法です。沢山の方法が有ると思いますが、もう一つの方法は、Gの座標を使わずに2つの面(計4つの点)の座標《【図39-a,d】の寸法》だけから計算する方法です。この方が考える事を楽しめます。ヒントは《*4》。 |
*4a 地球の重心がEcの方向であるとき、Gから地面への垂線の足Ghcは、【図39-b】と【図39-c】とで全く異なる点の様に見えますが、実は同一の点です。共に同じ接地面:三角形PQD上の、同一位置の点ですが、【図39-b】が回転軸PQの延長線上から見ているのに対し、【図39-c】は回転軸PDの延長線上から見ているからです。 *5 各段階でのLr 等の値は次の通り。 回転軸 地球重心 Lr Lh Lm PQ Ed~Ec 476.08 Lhdr~Lhcd 1072.27 PD Ec~Eb 507.98 Lhcq~-Lhbc 929.05 CD Eb~ 603.92 Lhbp~ 1328.85 Gha ~Ea 573.24 ~0 1311.84  図41 |
*6 TOPページの傾き計算の所に書いた様に、37.5°の傾き角は「ハンドルを真っ直ぐに向けた状態に固定した」ときの本体中心面の傾きの実測値なので、本体を左側に傾けた「P点立ち」の場合には右のハンドル・グリップと本体との間をロープで引っ張っておかなければなりません。 そのロープを使ってハンドルを真っ直ぐに向けた「P点立ち」状態から、もしもロープを解くと、ハンドルは左を向くので前輪接地点Cが【図39-d】の右のやゝ斜め上方へ移動する為、車体本体中心面の傾き角は37.5°よりも小さくなります《左側のP点が下がるのを路面が妨げる為》。一般に、「ロープを解く」など、物を「自由に」させると物は「より傾いて」重心は下がるので、この「本体傾き角が小さくなる」というのは、自然則に反する様に見えます。 しかし、反しません。バイクが倒れようとする力は、重心Gから この事は、「P点立ち」が成立している寸法上の条件と、ロープを解いたとき前輪接地点Cがハンドルの回転軸を中心とするほゞ円軌跡を描いて移動する《ただしこの場合の様にハンドルが回転する角度が大きくない場合》ことを考えると、作図計算によって確認出来ます。 *7 【図40】のb点の左側の青線の小さな「丸み」は主に前・後のサスペンションの伸びによるもので、青線の急な傾斜は、点Pの弾性に因るものです。つまり、P点の「踏ん張り棒」を固定しているバンパーが極く僅かに変形し、その変形にほぼ比例して力が大きく変化する為です。 b点の右側は、主に前輪サスペンションのバネが自由長《後述》まで伸び、そのバネの伸びに対応して前輪が地面に対して出す力が変化するので、やや大きい丸みを帯びます。 d点の左側の小さな「丸み」と急な傾斜は主にP点とQ点の弾性に因るもの。右側のやや大きい「丸み」は後輪のバネが自由長まで伸びる事に因るものです。 e点の左側の小さな「丸み」と急な傾斜はP,Q,及びRr点の弾性に由るものです。 |
|||
| クイズ①の角度を求めるのに、左記の2つの方法で小数点以下2桁まで計算してみましたが、その2通り計算結果は一致していました。その様に、計算の考え方や計算式が間違っていないかどうかを確かめる為には、必要以上に多い桁数でチェックしてみると、「偶然答えの数値“だけ”が合っていた」という事は避けられます。 【図39-a,d】の直交座標の寸法は、カメラの焦点距離が極く長いものではない事の補正をしているので、写真と補正をした点とは完全に一致していない点が有ります《図の上部と下部》。また、小数点以下を四捨五入しています。 数学クイズ② 【図39-b,c】のGhの軌跡(青の太線)は次の内のどの曲線の一部でしょう? 1.放物線 2.楕円 3.楕円ではない円 ヒント:車体を回転するのではなく、地面と地球の重心を回転させます。 クイズ②の答えは |
| 引き起こしの改善(2策) 【図40】で最も大きい力を要するのは、完全転倒時の52.1kgwです。これでは90歳になったら引き起こせないのではないかと思ったので、TOP頁に書いた方法を少し改良し、計算したのが【図40】の赤い線のグラフです。 【図39-a】のハンドル中央からほぼ真上方向に伸びている緑色のものが、Φ19(×910mm)のステンレス・パイプに、Φ16(×660mm)のパイプを、長さ250mmに亘って差し込んだ延長パイプ《 全長( 910+660-250=)1320mm》です。 以下、特許の文章の様な細かい内容になってしまったので、付随的な事として小さい文字で書きます。 バイクが左側に完全転倒している場合、そのパイプの接合部分の上(Φ16の部分)に【図39-a】の紫色の点線で示すロープを結び、そのロープの多端を左のバックミラーの付け根など、大きな力に耐えられる所《Srに近い所》に絡め、また、上記延長パイプの下端は、大きな力に耐えられる様に、前頁【図36】の右のハンドルの付け根に結んである紐の輪Bの中に通します《同図の紐の輪Aは不要》。 ハンドルを右いっぱいに向けて、上記延長パイプの上端を上げたときその上端が前頁【図35】の様に極力前輪中央面に来る様にロープの長さを調整しておきます。 【図39-a】の紫色の点線のロープを使った方が、前頁の紐の輪Aを使う場合よりも、太い方のパイプが遥かに曲がりにくくなります。 上記延長パイプの上端から50mm低い点を、引き起こしの力を入れる点Sre(【図39-a】)とします。そのときの回転軸PQからSreまでの距離Lm は、簡易作図法で1911.8mmとなり《点Sreがバイク本体中心面になったとき》、引き起こし力 Fs を計算する事が出来、結果は【図40】の赤線になります(最大値 29.2kgw )《→*7a》。延長パイプを使わずにSrに力を入れた場合(【図40】の黒線)よりも大幅に小さな力で済む事が分ります。 車体を更に引き起こして、回転軸がPDになったときにも、この延長パイプによってやはり同程度の割合で引き起こし力は小さくて済みますが、それは計算していません。 ↗ |
上記のとおり、【図40】のd点は安定点ではなく、ただちょっと引き起こし力と回転の方向が変化しているだけなので、延長パイプによる引き起こしはb点まで連続して行われなければなりません《→*7b》。 他に改善の手段が有ります。【図39-a】で、回転軸がPQのときの改善ですから、線分PQを重心Gに近づけると Lh が小さくなり、上記延長パイプを使わなくても済むかもしれません。 その場合、Q点の前後関係の位置を前にし過ぎると、完全転倒したときリア・ウィンカーが壊れてしまう可能性が有るので注意が必要です。 Q点の強度についてですが、現在の改造ではサイド・カヴァーに切り込みを入れ、Q点と本体フレームとをΦ13 のパイプで繋いで補強しています。それを“補強”ではなく、P点と同様、頑丈な構造にすると、Q点の位置を上げる事が出来ます。 すると【図40】のd点は右に移動し、PDを回転軸とするグラフがそのまま右に延長されるので、そのとき《回転軸がPDのとき》の引き起こし力の最大値は大きくなってしまいます。従って、PDを回転軸にしたときのFs の最大値と、PQを回転軸にしたときのFs の最大値が同程度になる様に設計するのが最適と言えます。新たに改造なさる方には お勧めです。 |
*7a このときもハンドルを右に36°いっぱいに回しておくことによって、ロープに掛かる力を少なくする事が出来ます。そうしないと大きな力に因って、パイプに結んである結び目がずれてしまうかもしれません。 この29.2kgw という値の計算は →*12c 。 *7b 長いパイプを使うのですから、完全転倒から一気に直立状態まで引き起こしたくなります。従って、TOPページで述べた様に前ブレーキのレバーに輪ゴムを掛けるなど、前輪が動き出す事を防ぐ処置を忘れない様にします。また、右側に倒れた場合にはサイド・スタンドを出しておくのも忘れてはなりません。 特に傾斜地では、延長パイプを使わない場合でも要注意です。 |
| バイクの重心の高さを測る一つの方法として、先ず車体を通常に直立させた場合の例えば前輪に掛かる荷重を測定し、次に後輪だけを高くして前傾姿勢にしたときの前輪荷重を測定して、その2つの場合の荷重の違いにより計算するという方法があります《→*8》。 しかし、車体の質量が180kgのとき、その半分が約90kgだとしても、それを計るのは大変な作業です。計測に影響を与えないで直立状態を保つのも難しい問題です。 そこで、「P点立ち」の傾き角など、今までに測定したデータだけで重心の位置(高さ)を算定する方法を考えました。 重心の高さは、引き起こしの力を計算するのに必要なばかりではなく、バンク可能角を正確に計算するのにも必要です。 この重心位置の算定には、車輪の重量と、車輪を除く車体本体とを別扱いにした、正確な計算をしました。何故ならば、かなり重く出来ている車輪の重量《→*9》は、バイクの走行時には遠心力を含めて路面が直接受け止めるのであり、サスペンションのバネを縮めるものではないからです。 以下の計算では、前・後輪の重量と、それに付随して動く部分《フロント・フォークの下部や後輪スウィング・アームの車軸側半分》を、『車輪系』と呼ぶことにし、その重力を Ft とし、その重心を点Gt とします《Fgo=180kgw は今まで通り、車輪系の重力 Ft を含んだ車重として使います》。 改造バイク《ホンダ・ホーネット》の場合、特に後輪の幅が大きく、前・後輪合わせて Ft=24kgw として計算しました《これは推定値。ライダー込み重力の10%》。 この車輪系の重力 Ft を除いた車体本体の重力を Fgh とすると Fgh=Fgo-Ft =156 [kgw] となり、そのFgh の重心位置を点Ggh とします。前頁どおり本体中心面から Lc=368mmの位置に在るP点よりも、点Ggh は【図42-a】の様に Lgh だけ高い所に在るものとします。 ↙ |
*8 この方法では、例えばバイクを前傾姿勢にする場合に、前輪のサスペンションのバネが縮み、後輪のバネが伸びるので、正確に測るにはその事に対する対策も必要です。 |
*9 車輪の質量は特に高速走行時に安定感をもたらします。台風のとき高速道路で横風を受けたとき、車輪がスポーク・ホイール《自転車の様な車輪》だと「フラッ」としますが、重いキャスト・ホイール《アルミ鋳物製》の場合にはそれを感じた事が有りません。 低速走行中、または停車中は、台風でなくても強い横風で「フラッ」とします。これは車輪の高速回転による「フライ・ホイール効果《回っているこまが倒れにくい効果》」が無い為です。 |
||||||
|
||||||||
| 【図42-a】のP点を所定の高さに取り付ける為、バイクを直立させ TOPページの立ちごけ防止策1の「P点取り付け治具」(【図8】)を使いますが、その取り付けのとき、【図42-a】の様に θj=28°,Lpj=28mmになる様にP点を取り付けました。 また、上記《*2》に書いた様に、前後方向重心位置Gでのタイヤ幅方向の『2つのタイヤによる実効曲率半径をRt 』とすると、その値は Rt=78.3mmです《計算の仕方は*2 》。 【図42-a】の様に、そのタイヤの実効曲率半径の中心《以下『タイヤの実効中心』と呼びます》をPt とし、地面より Rt だけ高い点で示します。 図中の距離 Ltj を同図の様に定め《ライダーが乗っていない直立時》、タイヤの実効中心Pt と車輪系の重心Gt との間の距離をLt とし、その値を Lt=330-Rt=251.7mm とします《330mm は後輪の半径よりも僅かに大きい値です》。 【図42-a】の幾何学計算により Ltj=Lc *tan θj-(Rt-Lpj )/cos θj (4) =138.70 [mm] となります。 この直立時にサスペンションのバネが受ける力は上述の Fgh です。 次に【図42-b】の「P点立ち」のときは、前頁までと同様 傾き角を実測値の θd=37.5°とし、そのときの同図に示す距離 Ltp は、幾何学計算により Ltp=(Lc-Rt*sin θd)*tan θd-Rt*cos θd (5) =183.68 [mm] の値が得られます《→*10》。同図の様に「P点立ち」のときの点PからCDまでの距離(地面上の距離)を Lpcp とすると Lpcp=Lc/cos θd-Rt *tan θd (6) =403.77 [mm] 。 また、「P点立ち」のときに車輪系の重力 Ft は、P点と接地点CDとに、Gt点からのそれぞれの水平距離に対応して割り振られるので、CDに割り振られる力を Ftt とすると ↗ |
Ftt=Ft *(Lpcp-Lt *sin θd )/Lpcp =Ft *(1-Lt *sin θd/Lpcp ) (7) =14.892 [kgw] の力が地面に対して垂直に働きます。 また、車体が直立状態から「P点立ち」になったときバネは (Ltp-Ltj )=44.981mmだけ伸びたので、バネが出す力は小さくなり、この「P点立ち」のときの力を Fkp とすると《前頁と同様、バネの強さは Kh=3[kgw/mm] 》 Fkp=Fgh-(Ltp-Ltj ) *Kh (8) =156-134.942=21.058 [kgw] になった筈です《→*11》。 一方、タイヤが路面から“真上方向に”受ける力を両輪合計で Fup とすると、その力 Fup はその力の一部を上記 Ftt に打ち消されて、 (Fup-Ftt )の力がタイヤの実効中心からサスペンションの下端に対して真上方向に働きます《→*12》。その力のバネ方向成分は (Fup-Ftt )*cos θd となります。 この力が、上記バネの力 Fkp と釣り合っていなければならないので、 (Fup-Ftt )*cos θd=Fkp ∴Fup=Fkp/cos θd+Ftt (9) =41.436 [kgw] となって Fup の値が求められました。 次に、P点を支点にしてバイクを回転させようとする外力の内、本体の重心Gghに掛かる重力 以外の外力《バネの力など内部応力は対象外》を考えます。 その力は 車輪系の重力 Ft とタイヤが受ける力 Fup の2つです。その2つの力に因るモーメントは、それぞれの力に P点からの水平距離を掛けた値であるので、P点を支点にしてバイクを真後ろから見て左回転させようとするモーメント《この2つの力に因る差し引きモーメントを Trq とします》は Trq=Fup*Lpcp-Ft*(Lpcp-Lt*sin θd ) (10) =10717.5 [kgw *mm] となります。 ↙ |
*10 この(5)式は、(4)式とは全く異なる形をしていますが、(4)式の θj,Lpj に、それぞれ θd(37.5),0 を代入すると(4)式の値は(5)式と同じ値183.68 になります。これも、2つの式が間違っていないかどうかのチェックになります。 *11 路面が滑りやすく、バネが自由に伸び縮みする場合。 路面の摩擦が大きいと、重心位置の算定に誤差を生じます《後述》。 *12 サスペンションは【図42-b】の様に地面近くまで伸びていませんが、サスペンションの下部と一体になっているタイヤの実効中心Ptが真上方向に受ける力が (Fup-Ftt)である事に変わりが有りません。 それは、次の様に考えると納得がいきます。 車体本体が【図42-b】の様に傾いた状態に固定した後、タイヤの周辺の地面を抉り取ってその替りに真下から力(Fup)でタイヤを押します。そのとき、サスペンションの延長上の点Ptの位置でサスペンションの下部がが受ける力は、タイヤの下からの力(Fup)の内、タイヤの重力 Ft の一部(Ftt )で打ち消された力である事が分ります。 |
| いま、車輪系を除く本体Gghの重心位置が、【図42-b】の様にP点から水平距離 La の位置に在るとします。するとGghの重力 Fgh に因って P点を支点にして車体を右回転させようとするモーメントはFgh *La となり、この値が上記(10)式に示す左回転モーメント:Trqに等しくならなければなりません《モーメントが釣り合っているから安定しています》。つまり、 Fgh *La=Trq 。 ∴La=Trq/Fgh (11) =68.702 [mm] となります。【図42-b】の幾何学上の計算から Lgh=(Lpcp-La )/sin θd-Ltp (12) =366.73 [mm] であるので、計算により車輪系Gtを除いた車体本体の重心位置が確定したことになります《→*12a》。 この重心は車体本体に対して動きませんが、車輪系を含めた車体の重心はサスペンションの伸びに対応して、本体中心面方向に動きます。 バイクが直立しているときの車輪系を含めた車体の重心Gの、地面からの高さ Lg を【図42-a】から計算すると Lg=〔Fgh*(Lgh+Ltj+Rt)+Ft*(Lt+Rt)〕/Fgo =549.90 [mm] (13) です。この値は、TOP頁および前頁での推定値 584mmよりも、34.1mm低い値です。 また、上述の「引き起こしに必要な力」 Fs のグラフ【図40】を画く為に推定した重心位置は、【図39-a】のP点から356mmだけ高い位置でした《356.24mmで計算しました》。 左右2つのP点の中央位置をPpとし、新たに確定した車体本体の重心位置 Lgh 、及び完全90°転倒時のPp~Pt間距離 Ltf (=Ltj+Fgh/Kh=190.70)の値《→*12b》から、完全90°転倒時に於ける車輪系の質量を含めた車体の重心位置:G~Pp間 ↗ |
距離《Lgf とします》は、 Lgf=〔Fgh*Lgh+Ft*(Lt-Ltf )〕/Fgo (14) =325.97 [mm] となり、【図39-a】で推定した重心位置356mmよりも30mmだけ小さい距離となります。つまり、完全転倒時には同図の中の点Ghdが 回転軸PQに対して 30*cos23.9=27.67mm だけ接近する《23.9°は 【図39-a】の線分PQがバイク直立時に水平面となす角度》ので【図39-b】の Lhdr (310.4kg)がそれだけ小さくなり、引き起こし力 Fs は Fs=(310.4-27.67)/1072.3 *180 =47.47 [kgw] (14-2) となって、それまでの計算結果の52.1kgwよりも大分小さくなります《↓*12c》。 また、「P点立ち」のとき、今までバネの長さは「P点立ちのときから変わらない」として計算してきました《【図40】の中の44.5kgw 》が、引き起こしの力を加える事に因ってバネが縮むことをも計算した、後述の「P点立ちにする時の力計算」の結果によると、「P点立ち」からの引き起こし力は それよりも更に喜ばしい事は、「P点立ち」のとき【図39-d】のGが上記30㎜ だけ「下がれば」《重心がタイヤ方向に近づくことを「下がる」と表現しています》そのときの垂線の足Ghb が緑の線の上を同図のCD側に移動するので、それ以上に倒れそうになったとき、「P点立ち」に戻ろうとする力《【図40】の中の -7.1kgw》が大幅に大きくなる《-10.1kgw になる》事です。 その戻ろうとする力は【図39-c】の Lhbc の値に比例するのですが、その値はこれまでの計算では、図の様に36.8mm しか有りませんでした。それが新たな計算では、52.3mm に増え、直立状態から手を放して自由に倒れさせたとき、路面がコンクリートのときには【図40】のc点を乗り越えて完全転倒してしまう ↙ |
*12a 重心の位置を求める為に今までの様に「未知数を使って連立方程式を解く」という数学的手段を使わずに、本文の様にもっと直接的に計算で求める方法にしてみました。 しかし、その為に「サスペンション下部が点Rtから真上方向に受ける力が (Fup-Ftt)である」とか、「【図42-b】 にはFghとFtとFupの3つの力が在るのに、FtとFupの2つの力だけを別扱いにしている」等、「本当にこれで良いのか?」と疑問を感じさせる部分が出て来てしまいました。 そこで、点Pを支点とする上記3つの力《バイクに対する外力の全て》によるモーメントを計算して、それがバランスしているかどうかチェックします。 Fgh*〔Lpcp-(Lgh+Ltp)*sin θd〕 +Ft*〔Lpcp-Lt*sin θd〕 -Fup*Lpcp =10718+6013-16731 =0 [ kgw*㎜ ] となるので、当然ながらバランスしています。 更に、接地線分CDを回転軸と見做して、P点が路面から受ける力を Fp として計算すると、Fp=138.56 kgw となり、(Fgh+Ft-Fup) の値と一致し、矛盾が有りません。 また、バネの力 Fkp を示す(8)式の中には車輪系の重力 Ft が入っていません。ということは Ft がバネに及ぼす力は 0 ということになります。これは Ftt を算出する為の前提として、「重力 Ft は、車輪系の重心Gtからのそれぞれの水平距離に対応して、点PとCDとに割り振られ」てしまい、バネを伸び縮みさせる力にはならないということの証明でもあります。 従って、重心計算にも、Ft を含まない簡単な計算方法が有る筈です。 Fup 等の値を、左の本文の様に数値ではなく、文字による式で求めてみると、(9)式は (7)式から Fup=Fkp/cos θd+Ft*(1-Lt*sin θd/Lpcp) となり、(10)式は Trq=(Fkp/cos θd+Ft*(1-Lt*sin θd/Lpcp)*Lpcp -Ft*(Lpcp-Lt*sin θd) =Fkp/cos θd*Lpcp となり、(11)式は La (=Trq/Fgh)=Fkp/cosθd*Lpcp/Fgh となって、予想通り La の計算は Ft を含まない計算式となり、車輪系を除いた車体本体の重心Gghの位置は、車輪系の重力 Ft とその重心位置 Lt に関係なく決定していることが分かりました《考えてみれば当然のこと》。 *12b 【図39-b】を見れば分かる様に完全転倒時は接地面PQRr はほぼサスペンション方向(本体中心面方向)と平行なのでバネは自由長(後述)となります。 |
| かもしれないけれど、アスファルトの場合にはP点が路面を凹ませ、エネルギーが吸収されて多分「P点立ち」で留まるのではないかと思います。 以上は新たな計算を踏まえての推定ですが、「P点立ち」の安定度が確実に増すことになります。 |
*12c 完全転倒のとき上述の延長パイプを使って Lm を1911.8㎜ に伸ばした場合の引き起こし力は、重心位置がそれまでの推測位置の場合 Fs=310.4/1911.8*180 =29.2 kgw でしたが【図40】、重心Gの位置が新計算位置の場合 Fs=(310.4-27.67)/1911.8*180 =26.62 kgw となります。 |
重心位置算定の疑念と誤差
| 上述した様に重心位置は、一般には“測定できちゃった”と言える程 生易しいものではありません。 特に重たい物の場合には尚更です。重心測定には、大きく分けて2通りの方法が有ります。一つは宙吊り“等”して静的あるいは動的バランス点を求める方法と、もう一つは前述した様に全体荷重のうち局所的な荷重《例えば前輪に掛かる荷重》を測る方法です。 今回の重心位置算定には、そのいずれかに入る様な大袈裟な測定は行なっていない様に思われます。その為「なぜ重心位置が計算できちゃったのだろう?」と、自分の計算に疑いの目を持って一つ一つの式をチェックしてみました。 その結果、重心位置を確定出来たのは、上記「局所的な荷重測定に相当する事をやっていたのだ」と気が付きました。重心位置の決め手は【図42-b】の3っつの力による、点Pを支点にしたモーメントのバランスですが、その計算に必要なのは Fup の値です。全体の荷重《Fgh+Ft 》はP点とタイヤCDとに掛かるので、Fup は局所的な荷重と言えます。 普通にはその測定に体重計の様な薄い重量計を使って図るところですが、それをしない代わりに角度(θd)を測定する事によってバネの伸び(Ltp-Ltj )を算出し、その値からサスペンションのバネが出す力 Fkp を(8)式によって算出し、その値によって Fup→La→Lgh を算出する事が出来たのです。 その重要な値 Fkp を求める事が出来たのは、(8)式 ↗ |
の中のバネの強さKh が既に分っていたからで、その Kh は私の体重60kg 弱の荷重に対してバネがどれだけ縮んだかを測定して分っていました。 つまり、バイク自身のサスペンションを、私の体重によって校正された“バネ秤”として使い、「P点取り付け治具」の裏側に貼り付けられた水準器付きの分度器の目盛りを読んで、Fkp という力を“測定”した事になります《→*13》。 重心位置算定の測定誤差 ① この重心位置測定に際して、最も誤差を発生しやすいのが、「P点立ち」にする直前の力の掛け方です。 ハンドル・グリップSr を持ってバイクを直立状態から傾けて「P点立ち」にするときには、前述した様に回転軸《今の場合CD》を中心とする円軌跡の接線方向に力を加えれば最も力が小さくて済むので、その方向に力を加えるのが普通です。 その、Srに力を入れてP点が地面スレスレで着地寸前のときの力《後述の Fss 》は、後述の項目「P点立ちにする時の力計算」での結果によれば36.666kgw であり、そのときのSrから線分CDに下ろした垂線《以下「線分SrCD」とします》が地面となす角度《θus 》は 43.884°、本体傾き角《θds 》は33.416°であるので、その力の水平方向成分は Fss*sin θus=25.417kgw となり、バネの力《Fkps 》もその計算結果で 125.12kgw という ↙ |
*13 私の体重でバネの縮みを測ったのは、飽くまでバネの硬さを測る為であり、Fkp の“測定”の為に測った長さは、Lc です。その長さ及び Lpj と、2つの角度測定《θj と θd 》によって「P点立ち」のときのバネの伸びと力が分かったのです。 *13a P点を着地させるとき普通は路面との間に大きな摩擦が有るので、P点が路面の何処に着地するかによってバネの力が大きく変わってしまうからです《地面の小さな突起のCD側か、それと反対側かによっても違ってしまいます》。 |
| 大きな力になっていることが計算されています。 「P点立ち」にするとき、直ぐ後に述べる様に、P点が地面と接したときの摩擦力とバネの力、及びSrに入れる力とが絡み合いながら着地し安定するので、そのときのバネに残った力を確定することは出来ません《↗*13a》。 上述の「重心の算定」でバネの力が Fkp のときの「P点立ち」の場合には、P点でもCD点でも真上方向の力だけで水平方向の力は 0 として計算しました。しかし、Srに上記接線方向の力を入れて「P点立ち」にした場合には、Srから手を放しても何らかの水平方向の力が残ります。その、P点とCD点に残った水平方向の力が互いに逆方向で、仮にその値が 上記 Fss*sin θus であったとすると、バネの力は Fkp から Fss*sin θus*sin θds =13.997kgw だけ増加し、バネの力は ほゞ Fkp+Fss*sin θus*sin θds=35.055kgw になり《→*14》、そのバネの力の値を(9)式の中の Fkp に代入すると Fup=59.078 [kgw] 、 その Fup を(10)式に代入すると Trq=23854 [kgw*mm] 、 その Trq を(11)式に代入すると La=152.91 [mm] 、 その La を(12)式に代入すると Lgh=228.40 [mm] となって、【図42-b】の様に水平方向の力が働いていない場合の上述の計算よりも、Lgh は138.33mmも小さい値になってしまい、この状態では非常に不正確な測定方法と言わざるを得ません。 しかし、重心位置を測定しようとするときには、【図42-b】の線分SrCDと直角な方向に力を入れるのが良くないのです《→*14a》。人が重たい物を地面に置くときには、当然ながら物に対して真上方向の力で支えながら置くのが自然なので、気を付ければ上記水平方向の力をある程度小さくする事が出来ます。 このとき、Srに真上方向の力だけを入れた場合でも、P点が地面と接触し Srに入れる力を徐々に小さくしていくのに伴ってバネの長さが変化して P点位置がずれていくのですが、P点がクーロン摩擦で滑らなくなった瞬間から ↗ |
*14 この式の Fss(36.666kgw)も,角度の θus,θds も共にハンドルをいっぱいに回してSrに力を入れたときの値ですが、この式の Fkp はハンドルも真っ直ぐに向けて力を入れたとき《【図42-b】》のバネの力です。矛盾が有りますが、誤差がどの程度あるかという計算なので御容赦ください。 図43 バネの長さが保持されます《→*14b》。その「“P点が滑らなくなった瞬間の”Srを支える力の水平方向成分を 0 にする」ことは余り期待することは出来ないでしょう。 しかし、P点が接地する場所に、グリースを塗った金属製のハンド・シャベルを敷いて「P点立ち」にすれば、P点とCD点に残る水平方向の力を、上記約25.42kgw の数十分の1 位にする事が出来、従って上記の Lgh の誤差も数十分の1に小さくする事が出来ます。 更に、もっと正確に測定したい場合には、平面度の高い2枚の固い金属板の間に粘度の高い潤滑油を塗り、それをP点の下に敷いて、「流体潤滑」で水平方向の力をほぼ 0 にして、その力による誤差をほぼ 0 にする方法も有ります。P点にはかなり大きな力が掛かる為、それよりも遥かに小さい力が掛かるタイヤの接地点CとDの2点で摩擦をほぼ 0 にする処置を行なっても同じです。 ↙ |
*14a 線分SrCDと直角な方向に力を入れる場合には、力は Fss の36.666kgwで済むのですが、真上方向に力を入れる場合には概略その cos43.88°分の1(つまり1.39倍=50.9kgw)の大きな力が必要です。 ただし、その真上方向の力については、バネの伸び縮みを考慮して計算していない為、その計算は飽くまで簡易計算です。 *14b Srを支えている力を徐々に小さくしていくとP点が路面を抑える力が大きくなるので、或る瞬間から、P点は滑らなくなります。それ以降 更にSrを支える力を小さくしたとき、バネが縮んで【図42-b】の線分P~Pp《Ppは左右2つのP点の中点》が路面となす角度(θd)が小さくなろうとしますが、その為にはPtがP点側に水平移動しなければなりません。ということはPtの真下に在るタイヤの接地点CDがP点側にスリップしなければなりません。ところが、そのときには既に「CDはクーロン摩擦で動かなくなった」としているので、PtがP点側に移動する事はなく、従ってバネの伸び縮みは有り得ません。 しかし、そのときSrを支える力を 0 にしていくのに伴ってP点が路面から受ける力は大きくなり、CDが路面から受ける力は小さくなっていきます。 |
② 重心測定に付いての次の誤差要素として、 バネの強さKhの測定誤差が有ります。バイクのサスペンションには多少なりとも静止摩擦《クーロン摩擦》が有るので、或る値よりも小さな荷重変化に対してはバネの伸び縮みは反応しません。その影響を小さくする為には振動を与えながら測定するという方法も有りますが、なんと言っても荷重を大きく変化させる必要が有ります。 少なくとも人の体重60kgw位の変化は必要です。そんなに重い錘はめったに無いので、私の場合自分の体重を掛けながら、車体の最下部と地面に置いたレンガとの間のギャップの変化を測定したのですが、これは危険なので独りで測定するのは絶対に止めた方が良いと思います。 シートから、前後方向の重心と思われる位置《→*14c》にロープ2本で左右2つのポリバケツをぶら下げて水を注ぎ、静止摩擦が無くなる様に上下方向に徐々に小さく揺さぶったり左右から大きな衝撃を与えたりし、安全を確認してから車体の沈みを測定するのが良いと思います《→*14d》。 そのときの、測定誤差の影響を考えます。 注いだ水の重さを体重計などで測定し、2つのバケツの水の合計が60kgwのとき車体の沈みが本来20mm沈むべきところを、静止摩擦 或いは測定誤差により 21mmという結果になってしまったとすれば、バネの硬さKh は Kh=60/21=2.8571 [kgw/mm] となり、結果は、(8)~(13)式の計算で Fup=49.54 [kgw] Lgh=332.3 [mm] Lg =520.1 [mm] となります。従って Lg の誤差は-29.8 [mm] となってしまうので、出来るだけ正確に測定する事が望まれます。 ③ 次の誤差要素として角度測定誤差が有ります。 上述の力の計算に必要な(Ltp-Ltj )を算出する基(もと)は長さ Lc と角度 θj と θd です。この角度誤差には、バ ↗ |
イクを直立させたときの後輪が正確に垂直になる様にする水準器の誤差と、θj の誤差,「P点立ち」のθd の測定誤差が有ります。また、「P点立ち」のときの点P,C,Dの平坦度もθd の測定誤差に入ってしまいます。 【図43】の水準器はキーホルダー用の安価で小さな物ですが、性能は立派なもの(日本、エビス社製)。僅かな角度で傾いた事が判別できる「感度」は0.0286°ですから申し分(ぶん)ありません。信頼性に相当する「精度」も±0.1432°なので、ほぼ最悪のケースとして、実際には θj が28°であるときに θj=28.1432 [°] と解釈してしまうと、直立時の重心の高さLg は Lg=535.46 [mm] と計算されてしまうので、実際の高さより14.4mm低い計算値になります。 上記角度の誤差0.1432°に相当する「P点立ち」のときの、P点の接地線分CDとの高さの違いは 0.1432*π/180 *Lpcp=1.01 [mm] であるので、正確に重心位置 Lg を知りたい場合には、十分に平らなコンクリート面などで傾き角を測る必要が有ります。 |
*14c サーヴィス・マニュアルに「車両重量」:「前軸 80」kgw,「後軸 86」kgw (計 166 kgw)とありましたので、重心位置は後軸から 1415*80/166=682 mm の所に車体のみの重心が在ると思われます《1415㎜ は軸間距離》。 本頁の【図39-a】では重心位置は後軸から 299+414-58=655 mm と推定していました。 前頁の【図22-d】では後軸から 1210*3/(3+4)=518 ㎜ と推定していました。》 *14d クーロン摩擦による誤差を小さくする為には、水を注ぐ前と後の両方のとき車体に振動を加える必要が有ります。 |
||||
| P点立ちにする時の力計算(線分SrCDに直角な方向に力を入れる場合) | ||||||
| いま、【図43-a】の様にハンドルを左一杯に回したとき、グリップSrの位置を示す寸法を 図中の Lsx(328.71㎜),Lsy(1052.99㎜)とし《それぞれ【図39-d】の329と 【図39-a】の1052で示した値》、【図43-a】のSrからCDに下ろした垂線(線分SrCD)の長さを Lmcs とし、線分SrCDが本体中心面となす角を図の様に θb とし、Srに線分SrCDと直角方向の力を入れて P点が着地する寸前《P点と地面との間の隙間が 0 》のとき、図の様に本体中心面の傾き角が θds になり、点Rtの位置を示す距離が図中の Ltps になったとすると、 θb=tan-1〔(Lsx-Rt*sin θds)/(Lsy+Ltps+Rt*cos θds)〕 (8-b) となります。図の様に線分SrCDが地面となす角を θus とすると θus=90-θds-θb (8-c) となり、P点と地面との隙間は 0 としているので、幾何学計算により(5)式と同様 ↙ |
||||||
| Ltps=(Lc-Rt*sin θds)*tan θds-Rt*cos θds (8-d) Lmcs=SQR〔(Lsx-Rt*sin θds)2+(Lsy+Ltps+Rt*cos θds)2〕 (8-e) となります。図の水平距離を Las,Lpcs とすると幾何学計算により Lpcs=Lmcs*cos θus (8-k) Las=Lpcs-(Lgh+Ltps)*sin θds (8-l) となります。 バネの力《 Fkps とします》を求めたいのですが、この計算の為には車輪系の重量を計算に入れる必要はありません《↓*14e》。その計算の為に、先ず車輪系の重量を除く車体本体の重量 Fgh によって発生する CD位置での真上方向の力《地面からの反作用》を Fuhs とするとその力のバネ方向成分は Fuhs*cosθds となります。その力に加えて、直ぐ後に述べるSrに加える力 Fss の、タイヤの接地点(CD)方向成分 Fssd の地面からの反作用《図中のCDに於ける-Fssd 》のバネ方向成分を加算した力が次のバネの力 Fkps となります。《Fssd と区別する為に“-Fssd”という名前にしていますが、図の方向の正の値の力です》 Fuhs=Fgh*Las/Lpcs (8-f) Fssd=Fss*tan θus (8-g) Fkps=Fuhs*cos θds+Fssd*cos θb (8-h) となり、その計算された力 Fkps に対応してバネは伸び縮みをするので Ltps=Ltj+(Fgh-Fkps)/Kh (8-i) となります。図の幾何学計算により ∴θds=tan-1〔(Ltps+Rt*cos θds)/(Lc-Rt*sin θds)〕 。 (8-j) この式の様に、求めたい未知数 θds が右辺の中にも入っていますが、主に θds の値を決めるのはこの式であるので、気にしないでそのまま繰り返し演算を行います。CDを回転軸としたときの Fgh と Ft による左回転トルクは Fgh*(Lgh+Ltps)*sin θds+Ft*Lt*sin θds であるので、その値が、上記 Fss の真上方向成分 Fssu による右回転トルク:Fssu*cos θus*Lmcs=Fss*Lmcs に等しくなければなりません。故に Fss=〔Fgh*(Lgh+Ltps)*sin θds+Ft*Lt*sin θds〕/Lmcs (8-k) となります《↓*14f》。 |
 図43-a 寸法Lasの右の(Lhg・・・)は (Lgh・・・)の誤り。 |
| この訂正後の11元連立方程式の解などは次の通り。 θds=33.416° , θus=43.884° , θb=12.699° Ltps=148.995㎜ , Lmcs=1299.12㎜ , Lpcs=936.33㎜ Fkps=125.116kgw , Fss=36.666kgw , Fssd=35.266kgw Fssu=50.873kgw , Fuhs=108.68kgw , Ftts=20.447kgw Las=652.31mm Fkps に Fssd*cosθb を加算する前の解は《↓*14g》です。 |
*14g 以下は連立方程式を解くプログラム。繰り返し計算(2510行~2539行)をする前のLtps,Lmcs,θus,θb, θds,Fss,Las の値は仮入力値。 2500 "FkpsSr" Lsx=328.71:Lsy=1052.99:Ltps=154.6:Lc=368 :Lgh=366.7315:Kh=3:Rt=78.3:Fgh=156:Ltj=138.7008:Lmcs=1310:θus=42:θb=12.5 2502 θds=35:Fss=40:Las=547 2506 degree 2510 "ReFkps" Lpcs=Lmcs*cos θus:Las=Lpcs-(Lgh+Ltps)*sin θds:Fuhs=Las*Fgh/Lpcs :Fkps=Fuhs*cos θds 2520 Ltps=Ltj+(Fgh-Fkps)/Kh 2525 θds=atn((Ltps+Rt*cos θds)/(Lc-Rt*sin θds)) 2527 θb=atn((Lsx-Rt*sin θds)/(Lsy+Ltps+Rt*cos θds)) 2530 θus=90-θds-θb 2535 Lmcs=sqr((Lsx-Rt*sin θds)^2)+(Lsy+Ltps+Rt*cos θds)^2) 2536 Fss=(Fgh*(Lgh+Ltps)+Ft*Lt)*sin θds/Lmcs:Fssu=Fss/cos θus :Ftts=Ft*(Lpcs-Lt*sin θds)/Lpcs:Fssd=Fss*tan θus 2537 Fssv=Fgh+Ft-Fuhs-Ftts-Fssd*sin θus-Fss*cos θus:Fssh=Fss*sin θus-Fssd*cos θus 2538 print "Sds=";int(θds*100+0.5)/100;"θus=";int(θus*100+0.5)/100;" Ltps=";int(Ltps*1000+0.5)/1000 2539 print"Fkps=";int(Fkps*100+0.5)/100;" Fuhs=";int(Fuhs*100+0.5)/100;" Fss=";int(Fss*1000+0.5)/1000 :print Fssv;Fssh 2540 stop :goto"ReFkps" 2545 end |
|||
この様に「-Fss*sin θb を加算したのは過ち」だとしながら、「Fssd*cos θb だけを加算する」ことには随分悩みましたが、この選択に間違いはありません。線分SrCDに直角な力を上記2つの力 Fssu と Fssd に分け、バイクが倒れるのを支える効果を持たない Fssd にはバネを縮める力になって貰い、Fssu 《=50.873kgw(上下方向の外力:Fgh+Ft-Fuhs-Ftts=50.873kgwと一致)》 にはバイクが倒れるのを支える役目を担って貰っています。Fssu もバネを伸ばす働きもありますが、バネを伸び縮みさせる力はバネの下から受ける力として(8-h)式でカウントされているので、Fss*sin θb をバネに係る力として加算することはバネに掛かる力を「上から」と「下から」のダブルにカウントする過ちとなります。 *14e 車輪系の重力 Ft は、路面CDとSr点とが Ft の力を受け止めてしまっています。Ft のうち Srに割り振られた力の反作用を含んだ値が Fssu です。 *14f ただし、ここでもハンドルは一杯に(36°)回すけれども引き起こしの軸CDは直進のままという計算です。タイヤの方向を36°回して車体を33°位傾けたときの、接地点Cの位置を計算するには、やって出来ない事はありませんが かなりの手間が必要です《ハンドルを25°切った状態で、前輪が10.7°傾いている状態は前頁の冒頭で計算されています》。 |
||||
| 力学クイズ① 上述の様に、Srに 線分SrCDに直角な力《上述の計算による Fss 》を入れ、P点を隙間 0 で地面から浮かせている状態のまま、その隙間及びタイヤと地面との間を強力な接着剤で固めてしまった後、重力:Fgh,Ft 及び力 Fss を全て無くしてしまったとすると、P点は地面に対してどういう力を出すでしょうか? ただし、地面は硬く、接着力は極めて大きいものとします。答えは 力学クイズ②《上述の連立方程式で解かれた数値で計算》 【図43-a】を見ると、車体本体(図の水色の部分)に作用してバネに力を及ぼしている外力は Fgh と Fss の2つだけです。「その2つの力のバネ方向成分《バネを縮める力を正》は Fgh*cos θds-Fss*sin θb =122.15 kgw であり、その方向の力はバネに対してだけ作用しています。従って、その力はバネが出している力と方向が逆で値は同じだ」と考えるのが普通《??》ですが、その力は上述の、接地点側から計算した実際のバネの力 Fkps (=125.12kgw )とは違います。何故でしょうか? 答えは |
● チェック 「車輪系の重量 Ft は接地点CDでは地面を抑える力になっているけれど、バネには作用しない」と言っています。その他の点も大丈夫かどうかチェックします。 先ず、バイク全体に掛かる上下方向の力《上方向を負》を実際の数値で検算します。 Fgh+Ft-Fuhs-Ftts-Fss*cos θus-Fssd*sin θus=10-8 kgw 。 左右方向の力《左方向を負》は Fss*sin θus-Fssd*cos θus=10-9 kgw 。 つまり、OK。Ltps についてはプログラムの中で(8-d)式で幾何学計算した後、(8-h)式で最終計算をしているので、得られた解の数値を使って(8-d)式の幾何学計算をしてみる他、P点を仮想の回転軸と見做して本体側に働く Fss , Fgh , Ft による回転モーメントが、車輪系に働く Fuhs+Ftts ,-Fssd , Ft による回転モーメントと値が同じで回転方向が逆である事も確認しました。 その他のチェックも行いました。 しかし、残念ながらそれらの「チェック」は、左記のバネの力に「-Fss*sinθb を加算する」という過ちを犯している状態の計算結果でも「チェック」を全て合格し、過ちを発見出来ませんでした。過ちを発見出来たのは、P点をSrに見立てて「P点立ちにする時の力計算」を上記訂正前のプログラムで行なってみたところ、上述の「重心の算定」の結果と僅かながら異なっていたからです。 |
| *14h 改定前《Fkps=Fuhs*cosθds のとき》の解。 θds=34.92° , θus=42.56° , θb=12.52° Ltps=161.43㎜ , Lmcs=1309.8㎜ , Lpcs=964.7㎜ Fkps=87.82kgw , Fss=38.65kgw Fssd=35.49kgw , Fssu=52.47kgw , Fuhs=107.11kgw Ftts=20.41kgw , Fssc=28.48kgw , Las=662.4mm |
 図44 図44 |
| 非直線性のバネ 前頁では車体各部の動作とフロント・フォークの動作を解析しなればならなかったので、フロント・フォークの延長上に車体前部の質量を代表させました。 その為、車体前・後部の質量を代表する位置も前頁【図22-d】の様に重心から3:4の位置にしました。しかし、これからは「車体全体の回転振動」等を解析する必要が無い為、解析を簡明にする為 重心Gから等距離の位置に 前・後のサスペンションが在り、バネの硬さ(強さ)Kh も前・後サスペンションが半分(0.5)ずつ受け持つものとします。 【図44】は、サービスマニュアルに載っていたフロント・フォークの中のバネの写真です。図中の寸法線で示した「自由長」《バネに力を加えないときの長さ》は「標準:293.4mm」と書いてあります。 良く見ると同図の右から19ターンまでは ほぼ一定間隔ですが、それより左の13ターンは2倍くらい密な一定間隔で巻かれています。ということは、バネが余り縮んでいないときには19+13=32ターンのバネとして機能しているけれど、“或る荷重”以上の力がバネに加わった場合、密に巻かれた13ターンは潰れて19ターンだけの硬いバネになる事が判ります。 つまり、バネの硬さはターン数に逆比例するので、サスペンションの硬さは、ターン数が32ターンであるときに比べて、バネが19ターンだけになってしまった場合にはフロント・フォークのバネは32/19≒1.7倍の硬さになる事が分ります。 ↗ |
一方、リア(後輪)のサスペンションの場合、バネ自体には非直線性は有りませんが、ライダーが体重を掛ける等してスウィング・アーム《前頁【図22-d】》が水平に近くなると、同図の「バネ」が後輪の上下動を“より効果的に《より多く》受け止める位置関係になる”ので、後輪への荷重が大きくなるにつれて次第に後輪のバネの硬さが増す事と等価になります。 従って、リア・サスペンションにも非直線性が在り、フロント・フォーク程ではないけれど、そのフロントフォークのバネが固くなる度合いの凡そ0.4倍位バネが硬くなると見做し、且つ、リアのバネが硬くなるのはフロントのバネが硬くなるのと同時《同荷重》であると見做しました《→*15》。 つまり、荷重が軽いときには全体のバネの硬さは今まで通り Kh=3 kgw/mmであるけれども、全体荷重が“或る荷重”以上になると、上記13ターンが非直線性の原因なので、バネが固くなったときの全体のバネの硬さ《Khb とします》は Khb=Kh*〔(19+13)*0.5+(19+13*0.4)*0.5〕/19 =Kh*1.4789=4.4368 [kgw/mm] (14-3) となります。 上記 バネが硬くなり始める“或る荷重”未満の、柔らかいバネの方が、路面から伝わる振動が小さいので乗り心地が良い筈です。しかし、前輪は急ブレーキ等にも対処しなければならないので、ここでは「直進走行のときよりも大きい荷重を受けたときバネが強くなる」とします。つまり“上記「或る荷重」とは「直進(等速)走行時の荷重」である”とします《→*15a》。 ↙ |
*15 後輪のサスペンションは、荷重の増加に対して緩やかにバネの硬さが大きくなるのですが、解析を簡単にする為にフロント・フォークと同様に、全体の“或る荷重”から階段状に大きくなるものとしています。 |
|||
| *15a 【図44】のバネの自由長「293.4㎜」の凡そ4分の1(75㎜)の13ターンが密に巻かれています。しかし、密に巻かれている部分も そうでない部分も、隣のバネの線材との間に隙間が有る限り“1ターン当たりの縮み”は同じです。 実測データにより車輪系24kgw を含めた総重量240kgw 《車体本体と車輪系との間に在るバネにとっては架空の荷重》に対する自由長からの縮みを32ターン全体で80㎜ としているので、バネの硬さ Kh は3kgw/mm です。従って、無荷重時から直立走行時《荷重 Fgh+Fgm=156+60=216kgw 》になったとき、バネは全32ターンで216/3=72mm だけ縮みますが、そのうちの上記13ターンに因る縮みは 72*13/32=29.25㎜ です。 バネの写真から判断すると、この13ターンのバネの無荷重時の隙間は その13ターンの長さ75㎜ の半分弱です。その「半分弱」の値が凡そ上記29.25㎜ であると見做せば、左記(本文)の「或る荷重」を「直進走行時の荷重」( また、直進走行時に車体が路面の凸凹で上下に振動したとき、バネが縮んだときだけバネが固くなって Khb になるので車体の振動のグラフは前頁の【図22-b】の形が少し変わり、周期も少しだけ短くなります。 |
すると【図45】の様に、全体のサスペンションの荷重(縦軸)に対するバネの伸び(横軸)のグラフは、直進走行の o点を折れ点とする折れ線グラフになります。 その o点より左の、バネに大きな力が加わるバンク走行時ではバネが固くなり(グラフの勾配が急になり)、走行速度が上がって車体が傾き、P点が路面スレスレになったときバンク角が θa であるとし、グラフ上でその点をaとします。 グラフの o点は当然ライダーが乗車していますが、j点はライダーが降りて直立させているとき、また p点は「P点立ち」のとき、f点はバネが自由長のとき(90°転倒のとき)です。《→*15b》 ライダーの体重を Fgm とし、今まで通り 車輪系を含めた車重 Fgo とライダーの体重との合計(総重力)を Fg(=240kgw )すると Fgm=Fg-Fgo =60 [kgw] 。 図中の j点の状態からライダーが乗って o点の状態になると、そのときのタイヤの実効中心Ptと上記Pp点と間の距離を Lto とすると《そのとき迄はバネは今まで通りの硬さ Kh であるので》 Lto=Ltj-Fgm/Kh (15) =118.70 [mm] 。 直線走行時に於けるライダーの身体の重心位置を点Ggmとし、その位置は車体本体に対して【図46】の Lgm(=782.52mm)《→*16》 で示される位置に在るものとします。 次に、カーブした道路を、P点が路面スレスレで《路面とP点との距離はゼロとします》、【図46】の様に『車体本体傾き角 θpa』でバンク走行しているとき、タイヤの実効中心が、同図の Lta に示される位置に在るものとします。 今、“ライダー(Ggm)と車体本体(Ggh)の両者に働く、重力と遠心力との「合力」の方向が、鉛直面から或る角度 θa の傾きになる様なスピードで走行している”と仮定すると、その合力の値は (Fgh+Fgm)*SQR(1+tan2θa) です。その合力の方向が図の様に本体中心面となす角度を θg とすると、サスペンションのバネが受ける力は (Fgh+Fgm)*SQR(1+tan2θa)*cos θg となるので、直進走行時に比べてバネの長さは (Fgh+Fgm)*〔SQR(1+tan2θa)*cos θg-1〕/Khb だけ短くなり、Pt~Pp間距離『Lta』は ∴Lta=Lto-(Fgh+Fgm)*〔SQR(1+tan2θa) *cos θg-1〕/Khb (16) となります。 次に、そのバンク走行時にタイヤの接地点CDが【図46】のLpda に示される位置になっているとすると、幾何学計算から Lpda=Lta+Rt*cos θpa 。 (17) すると同図の幾何学計算で θpa=tan-1〔Lpda/(Lc-Rt*sin θpa)〕 (18) となります。 |
 図45 点oでは Fh=Fgh+Fgm=156+60=216 kgw 《→*15b》 |
*15b o,j,p,f の各点は、*17で計算されている様に、別々にバネの伸びとバネの力を計算した点です。それ等を繋ぐと直線になりましたが、もしも計算が間違っていたら、グラフは o点の右側でも折れ線になってしまいます。 そのo点から右のピンクの線の部分は、TOPページのバネの硬さを示すグラフ《【図17】のA》と同じ硬さのバネであるのにグラフの傾斜が異なっています。それは、前頁【図17】のAの「バネの力」は車輪系の重力 24kgw を含めていたのに対して、左【図45】のグラフでは「バネの力」に車輪系の重力が除かれているからです。 *16 P点の高さからの、改造して低くしたシートの座面までの高さは写真から502.52mmです。ライダーが、ライディング姿勢を執っているとき、シートから身体の重心Ggmまでの高さは簡易実測により280mmでした《背中を下にしてライディング姿勢を執り、背中の下に枕を置いたときのバランスで測定出来ます》。 ∴Lgm=502.52+280 =782.52 。 |
||
| *17 TOP頁の「瞬間的なバランス」の【図16】 《【図14】の左上》。 *18 以下は重心計算。左端の数字はプログラムの行No.です。次の行の、例えば θd は実際のBASICプログラムの中ではSDとキー・インします。ポケット・コンピュータを“RUN”モードにして、「G.933」をEnter(↲)すると、直立時の重心の高さ:Lg を計算します。 933 Rt=78.3:θd=37.5:θj=28:Lc=368:Kh=3:Ltp=(Lc-Rt*sin θd)*tan θd-Rt*cos θd (一つの行の中では行替えは不要) :Lpcp=Lc/cos θd-Rt*tan θd:Lpj=28:Fgo=180:Ft=24:Fgh=Fgo-Ft:Lt=251.7 934 Ltj=Lc*tan θj-(Rt-Lpj)/cos θj:Fkp=Fgh-(Ltp-Ltj)*Kh:Ftt=Ft*(1-Lt*sin θd/Lpcp) 935 Fup=Fkp/cos θd+Ftt:Trq=Fup*Lpcp-Ft*(Lpcp-Lt*sin θd):La=Trq/Fgh :Lgh=(Lpcp-La)/sin θd-Ltp:Lg=(Fgh*(Lgh+Ltj+Rt)+Ft*(Lt+Rt))/Fgo 車体を完全な90°に横倒しにしたとき、【図42-b】のLtp に相当する距離をLtf として、【図45】を画く為に必要なので序に計算しておきます。 937 Ltf=Ltj+Fgh/Kh 939 PRINT “Lgh”;INT(Lgh*100+0.5)/100;“Ltj”;INT(Ltj*100+0.5)/100 (小数点以下2桁目を四捨五入) ;“Lg”;INT(Lg*100+0.5)/100;“Fup”;INT(Fup*100+0.5)/100:STOP 「C.」をEnterすると、以下のバンク可能角θa の計算を開始します。次の行の θa,θpa と Lta の値は、仮入力の値。 940 “SaBan” Fg=240 :Khb=Kh*(19+13*(0.5+0.4*0.5))/19:Lta=120:Lgm=782.52 941 “ReC” Lgr=(Fgh*Lgh+Fgm*Lgm+Ft*(Lt-Lta))/Fg :Lta=Lto-(Fgh+Fgm)*(SQR(1+(tan θa)^2)*cos θg-1)/Khb:Lpda=Lta+Rt*cos θpa 942 Spa=ATN(Lpda/(Lc-Rt*sin θpa)):θg=ATN(Rt*sin θpa/(Lgr+Lpda)):θa=θpa-θg バンク角 θa で走行しているときのバネの伸びを基準のゼロとしたとき、次の4っつの場合のバネの伸びの値をそれぞれ Ldo,Ldj,Ldp,Ldf とします。その4っつの場合とは、1.直立走行時、2.車体のみを直立させたとき、3.「P点立ち」のとき、4.90°横倒しのとき です。最大バンク角の計算には必要が無いけれど【図45】を画く為,及び完全転倒時の正確な引き起こし力 Fs の計算に必要です。 943 Ldo=Lto-Lta:Ldj=Ltj-Lta:Ldp=Ltp-Lta:Ldf=Ltf-Lta 944 PRINT “θg”;INT(θg*1000+0.5)/1000;“Lta”;INT(Lta*100+0.5)/100 ;“θa”;INT(θa*1000+0.5)/1000;“θpa”;INT(θpa*1000+0.5)/1000 948 STOP :GOTO “ReC” 「C.」をEnterすると941行に戻って再計算します。3回目の計算以降は収斂して Lta の小数点2桁目以上は変わりません。 950 END このポケット・コンピュータは、シャープ「PC-E650」。キー操作を数分間しないと電源が切れますが、ONすると電源が切れる前の画面が再現します。この機能が無いと、落ち着いて考える事が出来なくなります。 |
||||
| アインシュタインの一般相対性理論の等価原理によれば、地球などの引力と 直進加速運動や遠心力などの加速度に因る力とは、本質は同じで全く区別する事が出来ないものです。 従って、引力と遠心力とをベクトル的に加えた合力を「新たな引力」と見做すと、その新引力がGgh とGgm とGt の3箇所の物体に働いている事になります。 その内の1つ(Gt)はバネの伸び縮みに因って他の2つとの位置関係が現段階では確定していないのですが、その段階でも 3っつの物体を一つの「集合体」と考えれば、3っつの新引力を1つに纏めて扱う事が出来ます。 いま、「或る一点」に対してその3っつの引力の合計分《単純に足し算した値》の力が作用したのと等価である場合、その点が「重心」ですから、その重心の位置を点Grとし、その位置が【図46】の距離 Lgr で示される位置であるとすると、重心計算により Lgr=〔Fgh *Lgh+Fgm *Lgm+Ft *(Lt-Lta)〕/Fg (19) となります《Lgh,Lt については 【図43-a】に図示》。 上記の仮定では「ライダー(Ggm)と車体本体(Ggh)の両者に働く、重力と遠心力との「合力」の方向が、鉛直面から角度 θa の傾きになる様なスピードで走行している」としましたが、そのGgmとGghに働く「合力」の方向が「θa の傾き」ならば、Gtに働くその「合力」も当然同じ「θa の傾き」であり、従って総重心Grに働く「合力」(『新引力』とします)の方向も同じ「θa の傾き」となります。 そのGrに働く「θa の傾き」をもった「合力」の方向が、タイヤの接地線分CDに向いていれば、つまり傾き角 θa が【図46】の幾何学計算で求められる角度であれば、カーブを曲がるときP点が路面スレスレ《本体傾き角 θpa 》の状態を保ち続ける事が出来ます。 この様に重力と遠心力との「合力」の方向が、その力を受け止める点《この場合CD》に向いていれば、その傾き角が「真のバンク角」であるので《→*17》、真のバンク角は【図46】の θa であると言えます。 バンクの最大角度:バンク可能角 θa は、図から θa=θpa-θg (20) であり、ただし θg は 図の幾何学計算により θg=tan-1〔Rt*sin θpa/(Lgr+Ldpa)〕 (21) です。 以上の未知数 Lta,Lpda,θpa,Lgr,θg,θa は、式No.が斜体の(16)~(21)の6式からなる連立方程式を、繰り返し計算の方法で解くと求められます。その、ポケット・コンピュータの実際のプログラムを、上述の重心位置 Lg の計算《これは一発計算》と合わせて《→*18》に書いておきました。結果は Lta=113.57,Lpda=182.13,Lgr=447.82 [mm] θpa=28.881,θg=3.436,θa=25.446 [°] となります《→*19》。 もしも、上述のタイヤの実効曲率半径Rt が非常に大きい値のバイクの場合には、(21)式により、θg が大きくなり、従って(20)式によって「真のバンク角」が小さくなってしまい、スピードを出してカーブを曲がる事が出来なくなってしまいます。 つまり、本体中心面の傾き(θpa)は見た目には「バンクしている」印象を与えますが、それは「見掛けのバンク角」でしかない事が判ります。 |
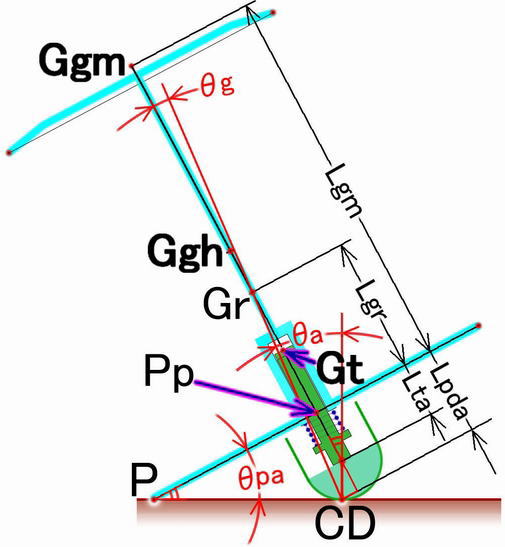 図46 P点スレスレ走行 |
*19 【図46】では総重心Grが車体本体の重心Gghより低い位置に画いてありますが、体重が車輪系の重量Ft に比べて遥かに軽い人でない限り、そういう事はありません。しかし、正確に画くと図中の角度が判り難くなってしまう為に、図の様にしています。 |
| 数学クイズ②の答え 答えは「楕円ではない円」です。 【図47】の様に車体の重心Gから引き起こしの回転軸《Pqとします》へ下ろした垂線上に座標 y 軸をとり、そのGを原点(0,0)とする図の様な直交座標を考えます。 水平な地面を【図46】の中の緑の点線の様に y軸に対して傾けて画き、その地面が回転軸Pqに接しているとき、Gからその地面に下ろした垂線の足をGhとし、Ghの座標を(x,y)とします。すると線分G~Ghは地面上の線分Gh~Pqに対する“垂線”なのですから、その2つの線分は直角です。 従って、地面の傾きが如何に変わっても「Ghが描く軌跡は円である」と言えます。しかし、それだけでは実感が湧かないので、計算で確かめます。 上記の2つの線分がなす角度が直角である事から、Ghからy軸に下ろした垂線の足を点Aとすると、△(三角形)G,GhAは △G,PqGhと相似の関係に有る直角三角形です。従って、G~Gh,Gh~Pq間距離を図の様にそれぞれ a,b とし、G~Pq間の距離を 2*c とすると x : a=b : 2*c b=2*c*x/a 。 また、相似形であることから y : x=a : b y/x=a/b y/x=a/(2*c*x/a)=a2/(2*c*x) 。 両辺に xを掛け、また、【図47】から aは a=SQR(x2+y2) であるので y=(x2+y2)/(2*c) ∴x2+y2-2*c*y=x2+(y-c)2-c2 =0 ∴SQR〔x2+(y-c)2〕=c となって、Gh(x,y)が描く軌跡は座標(0,c )《図中のB》を中心とする、半径 c の円である事が判ります。 |
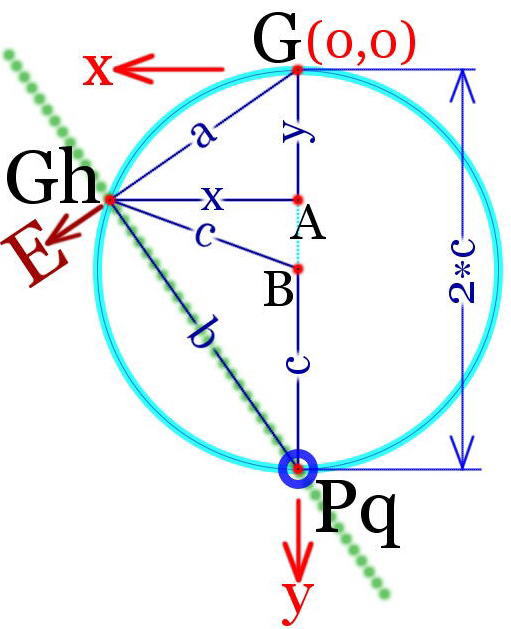 図47 |
| 力学クイズ①の答え 接着力が大きいのですから、バネの力がタイヤを押し下げようとしても P~CD間距離は Fgh 等の外力が有ったときの値《 Ltps 》から変わらず、本体傾き角《 θds 》も変わりません。バネが出す力はバネの長さによってのみ決まるのですからバネの力《 Fkps 》も変わりません《→*19a》。 重力等の外力が無いのですから接着されたCDとP点とは互いに逆向きで双方の力が打ち消し合う、水平方向の力でなければなりません。バネは Fkps の力で車体本体とタイヤとを押し広げようとしているので、CDとP点はそれぞれ外側の水平方向の力を出していることになり、その力の反作用としてCDとP点は地面から、【図48】の赤い線で示す それぞれ内側への水平方向の力を受けけています。 いま、そのP点が受けている力が図の様に右方向に Fx という値であったとすると、図中の車体本体(水色の部分)の点Ppが サスペンションの可動部(緑色の部分)から受ける力《図の都合で力は少しずらした位置に画いて有ります》は、上記P点が受けている力と釣り合う為に図の左方向の Fx でなければなりません。 上記車体本体がサスペンションの可動部から受ける力は、バネの力 Fkps と、サスペンションの摺動機構の上部と下部から受ける 本体中心面と直角方向の力《図中の F1 と F2 》だけです《→*20》。つまり、それ以外の力は無いのですから Fkps と (F1-F2)との合力が図の様に水平方向の力 Fx にならなければなりません。その各力の方向から Fx=Fkps/sin θds F1-F2=Fkps/tan θds でなければなりません。 つまり、答えの「P点が地面に対して出す力」は、水平方向左に Fkps/sin θds (= |
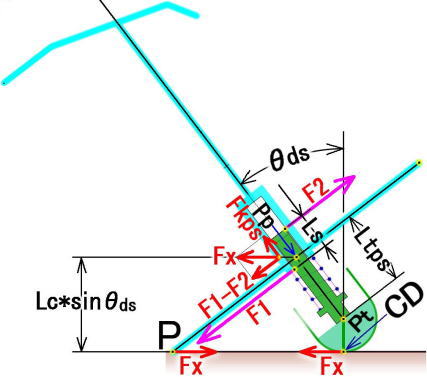 図48 *20 例えば、原理的にはオイル・ダンパーのピストンとその軸受けの2箇所で F1 と F2 の力を出すことも可能です。 また、後輪側のサスペンションの場合には全てのバイクが採用している様に、前頁で述べた「スウィング・アーム」と「サスペンション・ユニット」との2つから成る構造になっていますが、それは前輪サスペンションの様にサスペンション・ユニットの上部が車体本体に固定されたサスペンション構造と等価です。 【図48】では、力 F1 と F2 が作用する点(摺動部)の中点が Ppに在るときの説明をしていています《→*21》が、実際には摺動部がPpの位置に在るとは限らないので、その場合 摺動部の下端と上端から受ける力 F1 と F2 の値は如何なる値になるかを考えます。 先ず、その前に【図43-a】を見れば明らかな様に バネの力 Fkps は摺動部の位置に全く関係なく決まっていることを確認し、【図48】の摺動部の中心位置をPsとし、その路面からの高さを Hs としておきます。すると、【図48】の路面から受けているP点の力 Fx が 摺動部の中心Psで発生する力と釣り合う為には、【図48】に示すベクトル合成の様に、“力 Fkps” と “(F1-F2)”との合成力が Fx にならなければなりません。その為には、摺動部の高さ Hs に関係なく、 (F1-F2)=Fkps/tan θds でなければなりません。一方、P点とPsに加わる互いに逆方向の Fx によるモーメント《P点とPsとの高低差が Hs であるので、Fx*Hs》が、摺動部のモーメントと釣り合う為には (F1+F2)/2*Ls=Fx*Hs でなければなりません。従って、摺動部の高さ Hs が高くなると、(F1-F2)の値は Fkps/tan θds の一定値を保ちながら、 F1 と F2 とが共に大きくなっていきます。 |
*19a 車体本体の重力 Fgh の一部は摺動部とバネとを通ってCDに掛かるのですが、点PとCDが接着剤で固定されてしまった状態では、無重力になっても また逆に車体に重力が掛かっても Fkps の値は変わりません《図中の F1 と F2 の値は、重力状態と無重力状態とでは異なります》。また、車体のどの部分に手で力を加えても、Fkps の値は変わりません。 お疑いになる方がいると思いますが、例えば、車体本体の中心面の一点に斜め下方向の力《F3 とします》を加えた場合、P点は路面に対して斜め下方向に F3 の力を出し、P点の周りに発生する新たなモーメント:F3*Lc だけ 摺動部のモーメント: (F1+F2)/2*Ls の値が変化(減少)します《Lc は中心面からP点までの距離》。 つまり、本体中心に加えられた F3 は摺動部のモーメントの形でP点に伝わってしまい、バネの力 Fkps にも タイヤが路面を抑える力にも変化を与えません。 *21 【図48】では、点PとPpとの間のモーメント Fx*Lc*sin θds が、摺動部によるモーメント (F1+F2)/2*Ls と釣り合っています。 |
| このHPのTOP | 徐行・停止時の落とし穴 | ●計算の楽しみと重心の算定 引き起こしの力 重心の算定 真のバンク角と見掛けのバンク角 アインシュタイン 起き上がりこぼしバイク 立ち転けの可能性 立ち転け無しバイク 改良型前輪タイヤ 横倒れの計算 あとがき |
| 力学クイズ②の答え 力:Fgh と Fss の作用する点が違うので、或る方向の成分を足しても一般的には意味が有りません。 力が作用する点、厳密に言うと力の作用線(力の延長線)が違うと、それらの力の或る方向成分を取り出してもそれを足し算をする様に合成することは出来ません。 しかしその場合、それらの力は任意の点を「回転軸」と見做したトルクとしては「足し算」する事が出来ます。 例えばこの場合P点は地面からスレスレで浮いているので力の受け渡しは有りませんが、この点を架空の回転軸と見做して、車体本体に働く力《【図49】のピンク》:Fgh、Fss、Fkps によるトルクを足し算すると、-7,716.3kgw・㎜ のトルクとなります《左回転トルクを正としています》《→*22》。同様に同じP点を回転軸と見做して車輪系に働く力《【図49】の赤》:-Fkps、-Fssd、Fuhs+Ftts によるトルクを足し算すると、+7,716.3kgw・㎜ のトルクとなり《↓*23》、サスペンションの摺動部を介して本体側のトルクと釣り合っています。 次に、「回転軸」をP点ではなく、左右のP点の中点Ppを回転軸と見做した場合には、本体側に働く力によるトルクは-8,807.7kgw・㎜ となり《↓*24》、このトルクは車輪系から受ける力:図中のピンクの F1 と F2 に因るトルクと打ち消し合っています《「打ち消し合う」からには F1 と F2 に因るトルクの値は 8,807.7kgw・㎜ 》。 同様に車輪系に働く力による Ppを回転軸と見做したトルクを計算すると +8,807.7kgw・㎜ となります《↓*25》。このトルクは本体側から受ける力:図中の赤の-F1 と-F2 に因るトルクと打ち消し合っています。 ↙ |
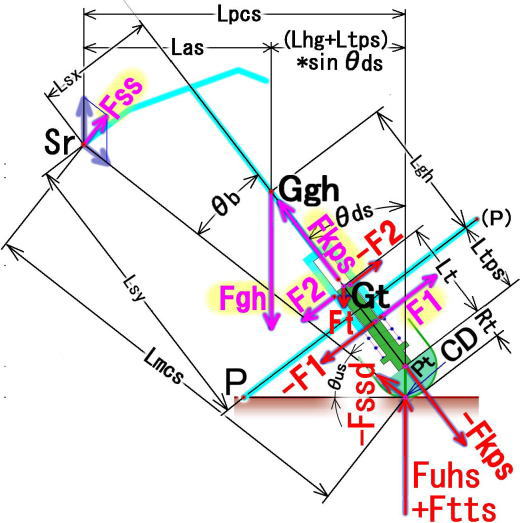 図49 点Pと点(P)の中点がPp |
*22 点Pから線分CDまでの距離を Lpcd とすると Lpcd=(Lc-Rt*sin θds)/cos θds=389.221 ㎜ となり、本体側に作用する力による 点Pを回転軸とするトルクは -Fgh*〔Lpcd-(Lgh+Ltps)*sin θds〕-Fss*cos θus*(Lpcs-Lpcd)-Fss*sin θus*(Lmcs*sin θus)+Fkps*Lc=-7716.3 kgw。 |
||||
| 確定させることは出来ますが F1 と F2 の個別の値を特定させる事は出来ません》。しかし、本体に作用している Fgh と Fss の力によって本体が また、解析を簡単にする為に、力学クイズ①の注《*20》で行なった仮定の様に、サスペンションの摺動部の中心を、架空の回転軸と見做したPpと一致させます。 すると次の2式が成立していなければなりません《式中の Ls は【図48】の様に摺動部の実質的な長さ(150mmとして計算しています)》。 (F1+F2)/2*Ls=8807.7 kgw*mm (22) Fgh*sin θds-Fss*cos θb-Fkps*0=50.143 kgw =F1-F2 。 (23) この連立方程式の解は F1= となります《↓*26》。 ↗ *23 -Ft*(Lpcd-Lt*sin θds)+(Fuhs+Ftts+Fssd*sin θus)*Lpcd-Fkps*Lc=+7716.3 kgw 。 Lpcd は*21参照。 *24 Fgh*Lgh*sin θds-Fss*cos θus*(Lpcs-Ltps*sin θds)-Fss*sin θus*(Lmcs*sin θus-Ltps*cos θds-Rt)=-8807.7 kgw*mm 。 *25 Ft*(Lt-Ltps)*sin θds+(Fuhs+Ftts+Fssd*sin θus)*Ltps*sin θds-Fssd*cos θus*(Ltps*cos θds+Rt)=+8807.7 kgw*mm 。 *26 すると、その答えによって計算した車体本体に働く力の「 また、本体側に働く力の「 |
F1a-F2a=50.143 kgw (23a) となります。一方、P点を架空の回転軸としたときの Fgh と Fss とによるトルクは*22で計算した -7716.3kgw であり、それを受け止めるトルク:(F1a+F2a)/2*Ls はその逆極性であるので (F1a+F2a)/2*Ls=7716.3 kgw (22a) となります。(23a)式から F1a=F2a+50.143 であるので、これを(22a)式に代入すると (F2a+50.1428)+F2a=2*F2a+50.143=7716.3*2/Ls ∴F2a=26.3706 kgw , F1a=50.143+26.371=76.513 kgw となります。 この値は上述の 「架空の回転軸」をPpにしたときの F1,F2 と異なるので、架空の「回転軸が何処に在るか」の“想定”によって現実の力 F1,F2 の値が変わってしまうことになります。 しかし、トルク計算の為の「架空の回転軸」をP点に移動したのにも拘らず、「P点を架空の回転軸とするトルクは 現実に本体中心面に在る摺動部で受け止められるのだから」と言って「P点を架空の回転軸としたときの Fgh と Fss とによるトルク:-7716.3 kgw 上記「架空の回転軸をPに移動した」のですから、そのトルクを受け止める場所もP点の位置でなければなりません。すると、そのP点に移動した摺動部が受ける力:F1a,F2a は上記の様に F1,F2 とは異なる値になって当然です。つまり、力学クイズ①の答えの*20で述べた様に摺動部の位置が高くなると(F1-F2)の値を一定に保ちながら(F1+F2)の値が変化するのと同様、「架空の回転軸」(摺動部)の位置が横方向に移れば (F1+F2)が変化する、つまり F1 と F2 は変わるのは当然です。しかし、それは摺動部を現実にP点に移す困難な改造をした場合です。 ↗ |
この項「力学クイズ②の答え」の冒頭に「力の作用線が違うと それらの力の或る方向成分を取り出しても一般的には意味が有りません」としています。 にも拘らず上述の「本体に作用している Fgh と Fss の力によって PPp方向に擦(ず)れ動いてしまうのを阻止している力が・・・ F1-F2 以外には考えられません」と言っています。この表現で、もしも「Fgh と Fss のPPp方向成分との『合力』が“F1-F2”だ」と言ったら間違いになります。何故ならば Fss と Fgh とは作用線が異なるので、或る方向の力の成分を加算するだけではなく、何処かの点を「架空の回転軸」にしたときの「トルク」をも計算に入れないと間違いになるからです。 しかし、「Fgh と Fss の |
4.起き上がりこぼしバイク |
| 今まで述べた普通のバイクの例では、「前後方向車体重心位置に於ける2つのタイヤによる実行曲率半径」:Rt 《以下『実行曲率半径』と略称》はこの頁【図39-d】の下の注*2で計算した78.3㎜ 《式中では78.6mm》でしたが、この「起き上がりこぼしバイク」の章では解析を簡単にする為に前・後輪のタイヤ断面の曲率半径を同じにし、且つその値を【図50】の様に大幅に大きくして『Rto』[mm] とし、その曲率半径の中心をPtとします。同様に前後輪のタイヤ幅も大幅に広くして その片側幅を同【図】のように『Lwt』[mm]《とします 車輪系の位置を代表する点として今までと同様にタイヤの「実行曲率半径」の中心Ptを選びますが、いま、直立時において、【図50】の中の黒の図の様にそのPtの位置が 車体全体の重心Gの位置よりも少し高い位置になる様な Rto の値にしたとします。 また、この起き上がりこぼしバイクは、上記 タイヤの Lwt と Rto 以外の寸法,質量,直立時の重心位置,バネの強さなどの定数は、今まで計算した普通のバイクの例と同じ値にします。 今、バイクが【図50】の中の青色の図の様にタイヤの曲率半径 Rto の曲面《この曲面をタイヤの『外周面』と呼ぶことにします》の左端で路面に接して「立っている《車体のみ》」とき その傾き角が θdo [ °] であるとすると、そのときもPtは接地点(図中のGh)の真上に来ます《タイヤは硬くて凹まず、路面は水平であるとします》。 そのとき、バネに掛かる力《車体本体の重力のバネ方向成分》は、直立時《Fgh=156[kgw] 》に比べて小さくなり、 Fgh*cos θdo [kgw]となるので バネが伸び、その直立状態から伸びた値が ⊿Lhto であるとすると ⊿Lhto=Fgh*(1-cos θdo )/Kh [mm] (24) です《 Kh は前・後輪合わせたバネの硬さ=3[kgw/mm]》。 次に、バイクを茶色の図の様に任意の傾き角 θd 《図の例では 20°》だけ傾けたときのGgh~Gt間距離を Lht [mm]とし、G~Gt間距離を Lgt [mm] 《 Lht も Lgt も傾きによって変わる変数》とすると、 ↙ |
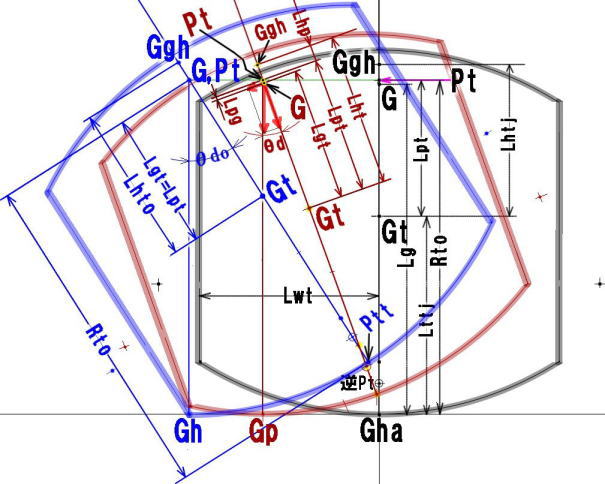 図50 |
||||
| GghとGtの集合体の重心がGであるので、 Fgh*(Lht-Lgt)=Ft*Lgt となります《→*27》《 Fgh=156 ,Ft=24 [kgw] 》。 ∴Lgt=Fgh/(Fgh+Ft)*Lht 。 ここで Kht=Fgh/(Fgh+Ft ) 《=0.86667》 と置くと Lht と Lgt とは常に《如何なる傾き角でも》 Lgt=Kht*Lht (25) の比例関係にあります。 従って Lgt と Lht のそれぞれの、傾きに因る変化分も同じ比例関係にあるので、再び傾きを θdo にしたとき、直立状態からの Lgt の変化分(伸び)は Kht*⊿Lhto となります。 直立状態のとき接地点であったタイヤ表面の点Ghaが、車体が θdo だけ傾いたときの中心面上の点Pttになったとすると、もしも「バネの伸び縮みが無かった場合」にはG~Ptt間距離は黒の図のG~Ptt間距離と同じ Lg [mm] ですが、G~Gt間距離( Lgt )は上記の様に Kht*⊿Lhto だけ伸びます。その伸びたとき《→*28》 “GがPtに一致する”様に Rto の値を選びます。 すると その伸びた結果のG~Ptt間距離が図の様に「実行曲率半径」の値:Rto になるので Rto=Lg+Kht*⊿Lhto (26) となります。また、【図50】の青の図の様に角度 θdo だけ車体を傾けたときタイヤの左端が接地したとしている為、図から θdo=sin-1( Lwt/Rto ) (27) でなければならないので、(24),(26),(27)の3式を満足する⊿Lhto,Rto,θdo の値を求めると次の様になります。 Rto=557.00 ⊿Lhto=8.187 ㎜ θdo=32.589° この値を求めるプログラムを《→*29》に示します。 以上の計算により、ライダーが乗らずに車体を或る角度 θdo だけ傾けて、タイヤの「外周面」の左端で立たせたとき、重心Gが接地点Ghの真上に来るので、「不安定ながらバランスしている」という ↗ |
条件を求める事が出来ました。この条件はバイクがタイヤの端部で立ったときギリギリ「起き上がりこぼしバイク」となる条件でもあります。 ●傾き角 θd のときの起き上がろうとする力 車体が横方向にタイヤで転がって任意の傾き角 θd になっているとき、車体は起き上がろうとしますが、その起き上がろうとするモーメントを求めます。 その為に上記の計算で決定した起き上がりこぼしバイクになる為の Rto の値を 定数とします《 Rto=557.00 》。 当然ながらバイクが如何なる角度に傾いていても常にPtは路面からの高さが Rto の位置に在ります。一方、傾き角 θd が θdo よりも小さくなるとバネ荷重が大きくなってバネが縮むので、重心Gは車体中心面上のPtの斜め下になります。 上記の様に「各定数は従来の計算例と同じ」としているので、直立時のGgh~Gt間距離も変わりません。その距離を【図50】の黒の図の様に Lhtj とすると、【図42-a】から Lhtj=( Lgh+Ltj )-Lt (28) 《=366.73+138.70-251.7=253.73mm》 。 直立状態から 傾き θd にしたときのGgh~Gt間距離 Lht の伸びは、(24)式の θdo が θd に替わった値であるので、 ↙ *29 例えば 2600 行からプログラムを書いたとき、G.2600 ↲ とキー・インします。 2600 "KOBO" 次の行の、例えば ⊿Lht ,θd は ポケット・コンピュータに それぞれ「DLHT」,「SD」とキー・インします。その行の⊿Lht,θd,Rto の値は仮入力値です。 2605 ⊿Lhto=6:θdo=32.6:Fgh=156:Kh=3:Lwt=300:Rto=557:Ft=24:Kht=Fgh/(Fgh+Ft) 2620 "Reθdo" ⊿Lhto=Fgh*(1-cosθdo)/Kh 2630 Rto=Lg+Kht*⊿Lhto 2640 θdo=asn(Lwt/Rto) 「asn ・・・」 は sin-1・・・ の意味。 2655 print "Rto=";int(Rto*1000+0.5)/1000;" dLhto=";int(⊿Lhto*1000+0.5)/1000;" θdo=";int(θdo*1000+0.5)/1000 2660 stop :goto "Reθdo" 「C.↲」(↲ はEnter)とキー・インすると、再計算します。 2665 end |
*27 GhとGtに働く2つの重力が、Gを支点としてバランスしている《モーメントの値が等しい》ので、左記の様な式が成立しています。 *28 バイクを如何なる角度に傾けてもGt~Ptt間距離は一定(従来例の330㎜)なので、G~Gt間距離( Lgt )の伸びがそのままG~Ptt間距離の伸びとなります。 |
| Lht は Lht=Lhtj+Fgh*(1-cos θd )/Kh (29) です。 直立時のGtの路面からの高さを【図50】の黒の図の様に Lttj [mm]とすると、その値は【図42-a】から Lttj=Lt+Rt =330 ㎜ となり、Pt~Gt間距離を【図50】の様に Lpt [mm] とすると、これは車輪系内の2点間距離であるので常に Lpt=Rto-Lttj =226.997 mm です。 上述《(25)式》の様に Lgt=Kht*Lht (30) であるので、同図の様にPt~G間距離を Lpg [mm]とすると図から Lpg=Lpt-Lgt (31) となります。 車輪系込みの車体全体の重力:Fgo 《=180[kgw]》を受け止める点は Gの真下ではなく Ptの真下の点であり、そのPtの真下の点をGpとすると、そのGpとG(Fg の発生点)との間の水平距離は Lpg*sin θd であるので、点Gpを回転軸と見做したときの右回転トルクを Trg とすると Trg=Fgo*Lpg*sin θd [kgw・mm] (32) です。 いま車体は左に傾いているので、この右回転トルク Trg は車体が自身の重力 Fgo に因って「起き上がろうとする」方向ですが、そのトルクを 点Gpを支点とした点Ptに於ける力《 「起き上がろうとする力」:その値を Fpt とします》に換算すると Fpt=Trg/Rto [kgw] (33) となります《 Fpt の方向は線分Pt~Gp(長さ Rto[mm] )と直角であるので向きは水平・右方向です》。 この力は重心Gの重力を点Gpで支える事に因るものであり、そのPt~G間距離 Lpg は、傾き角が20°の場合 、4.3775mm であるので、起き上がろうとする力は0.48 kgw という値になる事が分かります。 ↗* |
* 以上の、起き上がりこぼしバイクの「タイヤの左端で立った場合に不安定ながらバランスする」という条件にしたとき、この「起き上がろうとする力」:Fptは、傾き角 θd に対し【図51】の赤線のグラフの様になります《ライダーが乗っていないとき、点Pt位置での値》《→*29a》。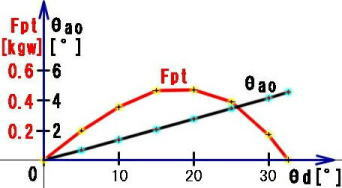 図51 起き上がる力 Fpt(車体のみのとき) と 真のバンク角 θao(ライダーが乗ったとき) 横軸 θd は本体傾き角 ●このバイクがバンク走行をしたときの速度 次に、体重 Mgm [kg] のライダーが普通の姿勢《 「リーン・ウィズ」:重心位置は【図52】のGgm 》で乗り、曲率半径 Rc [m] のカーブを Vc [m/sec] のスピードで走行したときの、前述の真のバンク角を θao とします。重力の加速度を g(=9.8[m/sec2] )で表すと θao=tan-1(Vc2/Rc/g) です。そのとき車体中心面が θd だけ傾いていた場合にバネに掛かる力を Fkb [ kgw ]とすると Fkb=(Mgh+Mgm)*g*SQR(1+tan2θao)*cos(θd-θao)〕 (34) です《 Mgh は車体本体の質量 156 [kg] ,Mgm はライダーの質量 60 [kg] 》。この(34)式の計算のとき、g を 9.8[m/sec2] などと計算せずに、“(Mgh+Mgm)*g [kg*m/sec2]”を纏めて (156+60) [kgw] として計算すると便利です。 ↙ |
*29a (29)式の右辺の中の唯一の変数:θd に任意の値を代入すると、車体の傾き角によって決まる Lht が決まり、その Lht の値によって Lgt,Lpg,Trg,Fptの値が求められます。 |
| するとバネが縮んで、Ggh~Gt間距離 Lht は、車体のみの直立時の距離 Lhtj に比べ (Fkb-Fgh)/Kh だけ縮む《→*30》ので、Ggh~Gt間距離《ライダーが乗っているときの値を示す為に“r”を付け、同図の様にLhtr とします》は Lhtr=Lhtj-(Fkb-Fgh)/Kh (35) となります。 一方、【図46】の中には Lgh は画いてありませんが、Ggm~Ggh間距離は Lgm-Lgh 《782.52-336.73》です。Ggmが、総重心Grを支点としてGgh及びGtと重力バランスしていなければならないので、Gr~Gt間距離を【図52】の様に Lrtr とすると Mgm*(Lgm-Lgh+Lhtr-Lrtr)=Mgh*(Lrtr-Lhtr)+Mt*Lrtr でなければなりません。この式を変数:Lhtr と Lrtr について整理すると (Mgm+Mgh)*Lhtr+Mgm*(Lgm-Lgh)=(Mgh+Mgm+Mt)*Lrtr となるので、ライダーを含めた総質量を Mr 《=Mgm+Mgh+Mt=240 [kg],Mt は車輪系の質量 24 [kg] 》 としているので Lrtr=〔(Mgm+Mgh)*Lhtr+Mgm*(Lgm-Lgh)〕/Mr (36) となります。 点PtからGtまでの距離は 傾きに係らず(斜め下に) Lpt 《=Rto-Lttj=226.997mm》であるので、点Ptから総重心Grまでの距離を斜め上に Lrpr とすると、 Lrpr=Lrtr-Lpt (37) となります。 上述した θao はそのときの「真のバンク角」であるとしているので、総重心Grに作用している重力と遠心力との合力《前頁と同様、この頁でも「新引力」と略称します(前述のアインシュタインの項 参照)》の作用線がPtの真下の接地点Gpを通っていなければなりません。 従って、その作用線の傾き θao は【図52】から θao=tan-1〔Lrpr*sin θd/(Rto+Lrpr*cos θd )〕 (38) でなければなりません。 以上の(34)式から(38)式までの連立方程式を、本体傾き角 θd の各値について解いた結果は次の【表1】の様になり、更に計算する点 を増やしてグラフにすると真のバンク角 θao は【図51】の黒線の様になります。 ↙ |
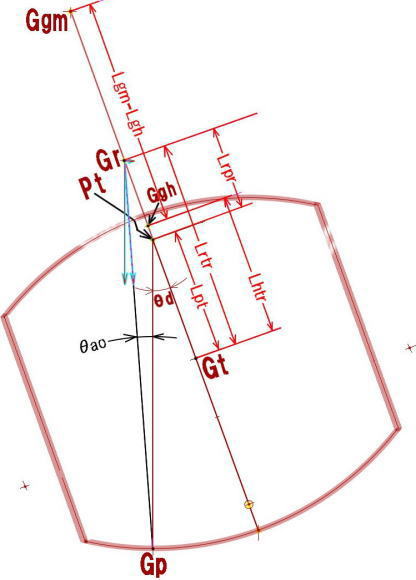 図52 |
*30 ライダーが乗らずに「起き上がりこぼし」状態でバイクを傾けるとバネは伸びるのですが、ライダーが乗って、しかも引力が「新引力」に増えるのですから、バネは縮みます。 *31 カーブの曲率半径を Rc [m] 、真のバンク角を θao とすると、カーブ走行速度は SQR(9.8*Rc*tan θao ) *3600/1000 [ km/時 ] 。 |
路面をタイヤのエッジ(端)ではなく「外周面」で走行しているときの最大の真のバンク角は、【表1】の最下段が示す様に4.580°であるので、例えば高速道路などカーブの曲率半径が 500mの場所では時速71.3㎞が最高であり、曲率半径 25mの交差点では時速15.9㎞が最高となります《↗*31》。 しかし、勿論それ以上のバンク角で走った場合、P点が路面を ↗ |
擦らない様にしてあれば、タイヤのエッジで走ればいくらでも速く曲がる事が出来ます。問題はタイヤの「外周面」走行から、エッジで走り始めるときの感覚に慣れる必要が有ります。 更に、「スタンドが無くても立っている」とは言え、子供が面白がってユッサユッサと揺さぶったら倒れてしまいます。 昔、サイド・スタンドで停車したばかりの400ccのバイクを私の目の前で大きく揺さぶられた事が有ります《 障害の有るお子さんだったのかもしれませんが、そういう事は現に有り得る事です 》《→*31a》。その子の体重が40kgwであったとすれば、身体を斜めにして力を入れていたので、10kgw以上の力が出ていたと思われ、上記のバイク自身が起き上がろうとする力(Fkp:最大約0.5kgw)を遥かに上回っていた筈です。 バイクを倒される事よりも、お子さんが大怪我をする事の方が深刻なので、停車時には両サイドに簡単なつっかえ棒の様な構造物が必要です《大人でもスタンドの無い2輪車を見たら揺さぶってみたくなります》。 ↙ |
*31a 序に「子供は何をするか分からない」という意味で実話をもう一つ。 私の家で250cc単気筒の納車のとき、サイド・スタンドでエンジンを掛けたままバイク屋さんと話をしていたら、子供(幼児)が近づいて足でギアのペダルをポンと押し下げました。勿論、誰もクラッチを握っていなかったので、バイクは発進して子供側に倒れ掛かって来ました。幸い、バイク屋さんがとっさに右のハンドル・グリップに手を伸ばしてくれたので、子供は助かったという事が有ります。 |
|||||||||||||
| 5.立ち転けの可能性 以下はバイクが倒れるとき タイヤの横方向の転がりを計算に入れて前頁よりも正確な解析をしていますが、「起き上がりこぼしバイク」の様に広いタイヤ幅の場合を含めた汎用的な計算をします。 加えて前頁では計算に入れなかった「リア・サスペンションによる横倒し力」も計算に入れ、更に「立ち転け無しバイク」の乗り心地の良し・悪しにまで言及しているので、この章の解析は長くなっています。 先ず、直立状態でライダーが乗ったとき、路面からの総重心の高さ《 Lgrj とします》を求めておきます。 バイクが前述の実際の計算例( Rt=78.3mm の場合 )で ライダー《 重力 Fgm 》が乗って車体を直立させると、【図42-a】の中のPtとPp《Ppは2つのP点の中点》との間の距離は【図】中の Ltj に比べ Fgm/Kh だけ縮むので、縮んだ距離を Lto とすると Lto=Ltj-Fgm/Kh ( =118.70 ,Ltj=138.70 ,Kh=3 ) となるので、ライダー込の総重心Gr(質量240kg)の 路面からの高さ《 Lgrj とします》は、 Lgrj=〔Fgm*(Lgm+Lto+Rt)+Fgh*(Lgh+Lto+Rt)+Ft*(Lt+Rt)〕/Fr =644.31 [mm] ↗* |
* ( Lgm=782.52,Rt=78.3,Lgh=366.73,Lt=251.7mm,Fr=240kgw ) となります《→*32》。 上述した様にこの頁の注*2 の車体の前後方向で重心Gの位置に於ける「2つのタイヤによる実行曲率半径」:Rt の計算では、前・後輪の幅方向曲率半径を“実際の数値”で計算しました。 しかし、ここからは前・後輪の曲率半径をどの様な値にしたら立ち転けの無いバイクにする事が出来るかを計算したいので、前輪の幅方向曲率半径を Rtf ,後輪の同曲率半径を Rtb として計算します。 次に計算するのは前輪接地点Cの位置です《この計算は前頁でも行ないましたが、本頁では前・後輪の曲率半径の大幅に違いや、前輪タイヤの断面形状を変えることにも対処するため、より厳密に解析を行います》。 ハンドルを25°切って車体本体を直立させたとき、Grの真下の路面上の点を、【図54】の様な(x,y,z)座標の原点とします《車体左水平方向を y軸とし、本体中心面前方を x軸とし、真上方向を z軸とます》。その座標が ( x=731.3 ,y=0 ,z=Rtf )の点 を Pcf 《→*33》, ( x=-700.2,y=0,z=Rtb )の点 を Pcb とします《Pcf,Pcbのサフィックスの c はその点が本体中心面上に在ることを表します》。 ( x軸の座標の値は【図53】参照) すると、前後方向の位置関係が【図53】《 前頁では【図22-l】 》に示 ↙ |
*32 この重心の高さは、前項《起き上がりこぼしがバンク走行をしたときの速度》で計算した【表1】の θd=0 のときの Lrpr+Rto (Rto=557 )の値と一致します。 *33 今ハンドルを25°切っているので、前輪タイヤの路面に接している幅方向曲率半径の中心は、このPcfから離れた位置に在ります。Pcfは飽くまで本体中心面《車体本体が直立しているときは y=0 》内の点です。 |
| す距離であるので、線分PcfPcbの、総重心Gr位置( x=0 )に於ける路面からの高さは次の値《 Rto とします》となります。 Rto=〔Rtf*700.2+Rtb*731.3〕/1431.5 [mm] (39) 《731.3=1431.5-700.2》。従って、その点の座標は ( x=0 ,y=0 ,z=Rto ) となりますが、この点をPcoとするとこの点は定義から「実行曲率半径の中心」であり、車体が【図54】の様に傾いても路面からの高さを Rto に保っているので、今までの解析で使ってきた車輪系の位置を代表する点Ptに相当しています。 また、本章では立ち転けの無いバイクを追求するので“ハンドルを大きく切っている”ことが、前章:4「起き上がりこぼしバイク」とは異なっています《→*33a》。しかし、ハンドルを大きく切ったからと言ってがバネの長さが大きく変わる訳ではない為《→*34》、前項と同様ハンドルを切った事による各重心などの間の距離の変化は無視します。 先ず、前頁「徐行・停止時の落とし穴」の【図21-d】左の注*↑で計算されている、車体本体直立状態でハンドルを25°切ったときの、前輪中心面の、鉛直面からの傾き角: sin-1[SQR(20.8042+50.3392)/294]=10.677° については、勿論タイヤの幅方向の曲率半径が大きくなっても変わる事は有りません《 294mm は前輪タイヤの半径》。 従って、前輪タイヤの曲率半径が Rtf の場合の前輪接地点Cは、前頁のタイヤ幅が 0 の場合の図:【図21-a】上の赤の楕円上のCよりも、前輪中心側に(同図の斜め下方向に)、次に示す距離だけずれた位置になります。《例えば Rtf=Rtb=557.00mm の場合と,Rtf=250 Rtb=150mm の場合の数値例は、それぞれ ( ) の中の黒い数値と,茶色の数値になります。》 Rtf*sin 10.677° (=103.20,=46.318) -50.339+Rtf*sin 10.677*cos 22.729 (=44.844 ,=-7.6179) だけ図の下方に来ます《50.339は【図21-c】の中の「50.3」の正確な値。【図53】のなかの「-39.8」という値は従来バイク例の Rtf=61.5 の場合の 上の式の値です》。 従って、前輪中心は本体中心面( y=0 の面 )よりも 8.5mmだけ図の下方に在るので、本体直立状態の前輪接地点Cのy座標は次の値《 Lccn とします》となります。 ↙ |
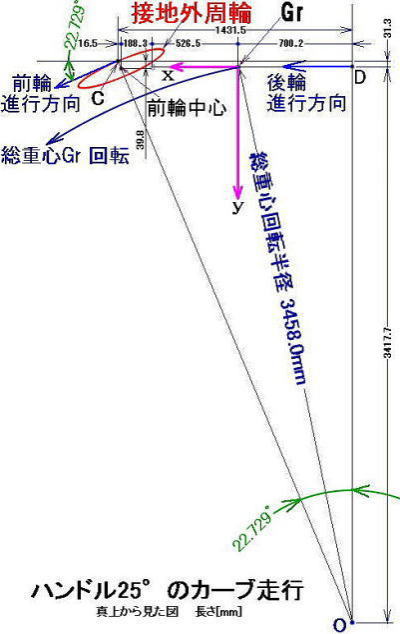 図53 ( 本体直立時、Rtf=61.5mm ) |
*33a 力学クイズ あるサイト:「バイクが曲がる仕組みを考える」に、「『バイクは傾くことで曲がる』とよく言われる」と書いて有る様に、私もそういう記事を読んだことが有ります。 しかし、前輪中心面を完全に本体中心面と一致させても、後輪の取り付け誤差が有ればバイクは曲がります。その他、バンク走行時に前・後輪どちらかの接地点の前と後ろのゴムの凹み具合に違いが有る場合にもバイクは曲がります《バンクした方向と反対側に曲がることも有ります:但し倒れない様に何らかの力を発生させる必要が有ります》が、いま、そういう事は無いものとします。 では、「左の【図】のバイクの場合」、カーブの曲率半径が1㎞ の高速走行ではハンドルを何度“位”に切ったら良いのでしょうか? 答えは下の力学クイズの答え。 *34 前輪の中心はハンドルの回転軸の延長線から多少《「オフセット」と呼ばれている距離だけ》離れた位置に在る為、ハンドルを大きく切ると前輪接地点Cの前後方向の位置が変わり、前輪が受け持つ力も変わります。また、全てのバイクで、ハンドル回転軸の方向とフロント・フォークの方向とは同じになる様に作られていますが、その2つの方向が異なる場合にはハンドルの切り角でバネの長さが変化します。 しかし、本項ではハンドルを大きく切った事によるバネの微妙な伸び縮みを無視しています。 肝心なのは「急停車時の慣性力が本体中心面に発生してその作用線も本体中心面に在り、その慣性力が フロント・フォークを介して伝わる力は、本体中心面から離れた 前輪接地点Cで受け止められる」という事であり、数値的に大事なのはその離れた距離です。またCが本体中心面より左に在るか右に在るかも重大な問題です。 |
|||
| Lccn=-50.339+Rtf*sin 10.677*cos 22.729+8.5 (40) (=53.344 ,=0.88210 mm) ここからは転がる距離をも計算しなければならないので、角度の単位は [rad] で計算します《 10.677°=0.18635[rad] ,22.729°=0.39670[rad] 》。 次に本体中心面を θd [rad] だけ【図53】のカーブの内側に傾けると、後輪が転がる距離は勿論 Rtb*θd ですが、前輪タイヤについては車体の横方向だけではなくハンドルを切った方向にも転がります。極端な場合としてハンドルの切り角が 90°の場合にはタイヤの外周半径( 294 mm)に θd [rad] を乗じた距離だけ転がるのですが、いまのハンドル切り角はそれ程大きくなく 25°であるので、外周方向の転がりは小さいと見做し 、曲率半径の転がり:Rtf*θd だけ図の下方に《本体中心面に対し直角方向に》転がるものとします。 すると前・後輪の接地点C,Dの y座標はそれぞれ Lccn+Rtf*θd ,Rtb*θd となります。この2つの接地点のうち、前者Cの y座標は前頁の「前輪が路面を蹴る力」によるモーメントを計算する為に重要な値であるので、その値を『Lccc』としておきます。 Lccc=Lccn+Rtf*θd 。 (40a) ( =328.64 ,=11.8096 ) この Lccc は、前頁【図21-d】の左の注 *↑ で計算された本体中心面からの前輪接地点Cの「ずれ」 Lcc (30.939)に相当する値ですが、極性が逆で、この頁では車体中心面よりも前輪接地点Cが図の下方《 y>0 の領域》に在る場合、正の値としています。 この転がり移動した後の接地線分CDと y軸との交点をGhoとすると、上記C,Dの y座標の値と 【図53】の位置関係から、Ghoのy座標《 Ygho とします》は Ygho=(Lccn+Rtf*θd)*700.2/1431.5 +Rtb*θd*731.3/1431.5 (40b) となり、 Lcco=Lccn*700.2/1431.5 (40c) ( =26.093,=0.43147 ) ↗ |
と「置く」と《 Lcco を上式の様に定義すると 》、(39),(40c)式から(40b)式は Ygho=Lcco+Rto*θd (41) (=26.092+557*θd ,=0.43147+198.91*θd ) 次に、“点”Cから、θd だけ傾いた“本体中心面”までの距離を計算します。これはハンドルを25°切った状態で車体を急停止させた瞬間の、慣性力の発生面から その慣性力を受け止める点Cまでの間の距離《この後の本文で「Lccd」と定義》です。 車体本体を θd [rad] だけ横に傾けたとき上記の様に「前輪も後輪も路面を真横方向に転がる」としているので、上述の“本体中心面上の点”:Pcf,Pcbは、路面からの高さ Rtf ,Rtb を保ちながら y=0 の位置から移動して y座標の値はそれぞれ Rtf*θd,Rtb*θd となります《接地点C,Dの移動距離と同じ》。このとき“本体中心面上の点”Pcoは、【図53】の位置関係にあるので移動後のPcoのy座標《Ypco とします》は次の値となります。 y=Ypco =Rtf*θd*700.2/1431.5+Rtb*θd*731.3/1431.5 となり、(39)式から Ypco=Rto*θd (42) となります。 また、点Pcf,Pcbが直立時の高さを保っているので、移動した線分PcfPcb上に在る点Pcoの高さも【図54】の様に移動前と同じ高さ( Rto )を保っています。以上の3点Pcf,Pco,Pcbを、移動前の車体の真後ろから見た図にプロットすると《点を画くと》、【図54】の様になります。 《ただし、この図は Rtf=250,Rtb=150 [mm] の場合の図ですが、 θd に関しては後述の連立方程式の解の値(θd=2.5044°)ではなく、図を判り易くする為に その値よりも大きい、θd=0.2 [rad] (約11 [°] ) にしています。また、Cの位置も偶々Pcfの直下に近い位置に在りますが、Rtf の値によって大幅に異なる位置に来ます。例えば、従来のバイクの計算例( Rtf=61.5mm )では、Cは y座標が負の領域(【図54】の x軸の右側)となり、前頁の注*↑で計算した y=-Lcc=-30.939 です。》 上記 Pcf,Pco,Pcbそれぞれの点は、その高さ zの値を y座標 ↙ |
上の力学クイズの答え 【図53】の線分COの長さが1000mであるので、【図】中の22.729°に相当する角度《前輪進行方向の角度》:つまり線分COが線分DOとなす角度は tan-1(1.4315/1000) =0.08202 ° となります。 上の質問では「左の【図】のバイクでは・・・何度“位”」と書いてあるので、キャスター角が26°のバイクで、ハンドルの回転軸の延長点から見て左に25°切ったら前輪の進行方向は本体中心面から22.729°の方向になったという結果から比例計算します。 ハンドル切り角が小さい場合には前輪の進行方向の角度はハンドルの切り角に正確に比例しますが、25°というのは45°よりも小さく、質問も数学の問題と違って正確さを求めていないので その近似計算で済ませます。 ∴0.08202/22.729*25 =0.0902 ° となり、ハンドルを 0.09°切ればよいことが分かります。 上記の角度22.729°の値は、【図53】の場合と同様、車体本体を直立させたときの値です。従って、曲率半径1kmのカーブを高速バンク走行をした場合には前輪もバンクするので、0.09°よりも少しだけ小さいハンドル切り角で 曲率半径1000mのカーブを曲がる事が出来ます。 ↙ |
| の値で割るといずれも“1/θd”となるので、その3点と座標の原点の計4点は、次の角度《図中の『γ』とします》の傾きをした一直線となります。例えば点Pcoの場合で計算すると、点Pcoと座標の原点とを結ぶ線が z軸となす角度は γ=tan-1〔(Rto*θd)/Rto〕=tan-1〔θd〕 (42a) であるので、γ は本体傾き角 θd と異なる値です《→*35》。 一方 点Grも点Pcf,Pco,Pcbと同様 本体中心面に在るので、「三角形」PcfGrPcbが鉛直面から θd だけ傾いた本体中心面となりますが、Cから本体中心面までの距離が問題となるのは、ハンドルを大きく切りながらの急停車ですから、徐行時のバンク角は小さいので、*35での計算例で分かる様に θd が小さい場合には γ≒θd (42b) と見做せます。従って、点Cから本体中心“面”までの距離は、点Pcfを通る傾き角 γ の“線”までの距離にほゞ等しいと見做せます。 その点Pcf《その y座標=Rtf*θd 》を通る勾配:1/tan γ の線《傾き角が γ の線》が y軸と交わる点の y座標は Rtf*θd-Rtf*tan γ 《 <0 》 となり、γ≒θd であるので、点C( y=Lccc )から本体中心面までの距離《『Lccd』とします》は Lccd=〔Lccc-(Rtf*θd-Rtf*tan θd)〕*cos θd (42c) となります《→*35a》。 θd [rad]≪1 であるので θd≒tan θd 《=sin θd/cos θd≒θd 》となり、(42c)式は Lccd≒Lccc*cos θd (42d) となります《 Lccc は (40a)式 》。 Lccd の値は、急カーブの徐行・停止直後にフロント・フォークが路面を蹴ってバイクをライダーごと横倒しするモーメントを計算するのに必要となります。 次に計算するのは、停止する前の急カーブの徐行を真のバンク角 δ で継続しているときの本体傾き角 θd の値を求めます。 【図52】の起き上がりこぼしバイクでは前・後輪の曲率半径を同じにしましたが、【図54】のPcoは 上記の様に本体中心面内を「バネ ↙ |
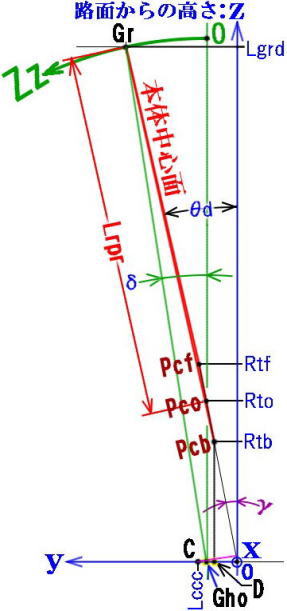 図54 |
力学クイズの答えの続き この、前輪の傾きが増えるとハンドル切り角が多少小さくなることを無視すると、カーブを曲がるスピードで0.09°という値が変わる事は有りません。つまり、ハンドル切り角は、カーブの曲率半径のみによって決まります。 *35 「θd を [rad]で計算すれば tan-1θd=θd ではないか」と思いがちですが、それは θd が極く小さい場合にしか成立しません。θd が大きく、例えば (tan θd) が 1.0 の場合 tan-11.0=0.78540[rad] です。 Rtf=Rtb=557の場合と、Rtf=250,Rtb=150の場合について この後の連立方程式を解いて得られた θd の2例では、θd と(42a)式の γ との違いは次の通り。 θd γ 0.49775[rad](=28.519°) 0.46185[rad] 0.043710[rad](=2.5044°) 0.043682[rad] 。 従って、私の様に細かいことが気になる方の為に明示しておきますが、Pcf,Pco,Pcbの3点と(y,z)座標の原点の計4点は、z軸と角度 γ をなす平面内に在りますが、点Grはその面よりも少し路面側《下側》に在ります。 更にもう一つ。三角形PcfGrPcbは本体中心面ですが、(y,z)座標の原点をOとすると、三角形PcfOPcbは本体中心面よりも少し傾斜が急な面であり、その二つの三角形は線分PcfPcbで少し折れ曲がって接しています。 *35a この Lccd は、厳密には「点Pcfと x軸とを含む面”から点Cまでの距離」なのですが、(42b)式により、その“点Pcfと x軸とを含む面”と“本体中心面”とは限りなく同一面であると言えるので、(42d)の Lccd は、「点Cから“本体中心面”までの距離」に限りなく等しいと言えます。 |
| の伸び縮み」で動く 車輪系側の点ですから【図52】のPtに相当します《→*35b》。Pco~Gt間距離《Gtは車輪系の重心》を【図52】と同様に Lpt とします《 もしも【図52】の様にPcoがGtよりも斜め上に在れば Lpt は正の値ですが、逆ならば負の値とします。普通のバイクでは【図49】の様にPtがGtよりも下になるので Lpt は負の値です》。 また、【図54】にはGrしか画いてありませんが、各重心間などの距離を【図52】と同様 Ggh~Gt間距離を Lhtr ,Ggm~Ggh間距離を(Lgm-Lgh),Gr~Pco間距離を Lrpr とします。 いま 車体中心面を θd だけ傾けながら、急なカーブを徐行速度で曲がる為のバンクについて考えます。 前頁の注*34で計算した様に、ハンドルを25°切って1m/sec の徐行速度で曲がるには、真のバンク角は δ(=1.6929°)になります。 その真のバンク角 δ で徐行しているとき本体が θd だけ傾いていたとしているので、車体本体GghとライダーGgmに作用する「新重力」によってバネに掛かる力 Fkb は、前項の(34)式と同じ Fkb=(Fgh+Fgm)*SQR(1+tan2δ)*cos(θd-δ) (43) です《(34)式中の真のバンク角 θao は徐行時の δ に替わります》。 前述の様に、車体のみの直立時のGgh~Gt間距離は(28)式の Lhtj(=253.73mm)であるので、ライダーが乗って本体傾き角 θd ,真のバンク角 δ でバンク走行をしているときには Ggh~Gt間距離は (35)式と同じ Lhtr=Lhtj-(Fkb-Fgh)/Kh (44) になります《 前項の起き上がりこぼしバイクの場合と違い、前・後輪の曲率半径 Rtf,Rtb が大幅に異なるとき本体を大きく傾けると、車体は少し前傾または後傾姿勢になりますが、今、δ が小さく、従って θd も小さいのでそれは無視出来ます 》。 前項(高速バンク走行)と同様、「Ggm」は「Ggh及びGt」と 総重心Grを支点としてバランスしていなければならないことから前項の(36)式が導き出されたのと同様、Gr~Gt間距離 Lrtr は、 Lrtr=〔(Mgm+Mgh)*Lhtr+Mgm*(Lgm-Lgh) 〕/Mr (45) です。上記Gr~Pco間距離 Lrpr は、【図52】から(37)式と同じ Lrpr=Lrtr-Lpt (46) です。【図54】のGrの路面からの高さを Lgrd とすると Lgrd=Lrpr*cos θd+Rto (47) ↗ |
となります。するとGrとPcoの高さの違いは(Lgrd-Rto)であり、線分GrPcoは θd だけ傾いているのでその水平距離は (Lgrd-Rto)*tan θd となり、Pcoの y座標(Ypco)は(42)式に示す Rto*θd であるので、そのときのGrの y座標《これを Ymr とします》は Ymr=Rto*θd+(Lgrd-Rto)*tan θd (48) です《→*35c》。 一方、真のバンク角 δ でハンドル切り角25°の徐行をしたとき、Grからの「新引力」の作用線が 接地線分CD上の点Ghoを通る為には、Grの位置は【図54】の Ymr=Ygho+Lgrd*tan δ 。 (49) (41)式の Ygho を(49)式に代入すると Ymr=Lcco+Rto*θd+Lgrd*tan δ (50) (Lgrd-Rto)*tan θd=Lcco+Lgrd*tan δ (51) ∴θd=tan-1〔(Lcco+Lgrd*tan δ)/(Lgrd-Rto)〕 (52) 例: 《 δ=1.6929°》 θd=28.519°,Lgrd=639.82,Lrpr=94.25,Rto=557 mm θd=2.5044° ,Lgrd=643.86, Lrpr=445.37, Rto=198.91 mm となります。この解の「例:」は、Rtf=Rtb=557 の場合と 茶色の小さい数字の Rtf=250,Rtb=150 の場合の値ですが、曲率半径 Rtf ,Rtb を、前頁の普通のバイクの例など、いろいろな値の Rtf と Rtb の組み合わせで計算すると【表2】になります《前頁の普通のバイクの一例は【表2】の下から3段目》。《連立方程式を解くプログラムは*36↓》《ただし、前頁の計算結果である【図22-m】と全く同じ結果を得る為には、Lgrj=680mmにし、次の修正が必要です。 Lgh=(Mr*680-Mgm*(Lgm+Lto+Rt)-Mt*(Lttj))/Mgh-Lto-Rt=421.646 , Lhtj=Lgh-(Lt-Ltj)=308.646 ,Rtb=94.46 (→Rto=78.338 になります)》。 |
*35b 【図54】で車体本体とライダーに掛かる「新重力」は、点Pcoを介してその力が前・後輪のサスペンションに割り振られ、その割り振られた力に対して同じだけのバネに縮みになる様に、前・後輪のバネの硬さが設定されています《前頁参照》。 従って、前・後輪のバネの縮みが同じである事を前提にしている【図52】のGr~Pt間距離 Lrpr を、【図54】のGr~Pco間距離としてを適用する事が出来ます。 *35c (48)式の替りに Ymr=Rto*θd+Lrpr*sin θd として計算しても、連立方程式で同じ解が得られます。しかしその場合には、(52)式の中に sin-1(・・・) という演算が入って来るので、その最初の演算のとき、(・・・)の中の数値が1以上になってエラーが出る場合が有ります。 |
フロント・フォークによる横倒し力の計算は、前頁での Ksc,Rsc の訂正を実施済みの値です。【表】中の前輪ロックの場合の「両輪横倒し力」:Fwzfoは、その「前輪横倒し力」Fszfoに「後輪横倒し力」Fuzfoを加算した値です。Rtf=420,Rtb=61.5の場合の Fuzfo,Fszbo,Fuzboの値はそれぞれ+0.299,-9.950,+0.366kgwです。 前頁ではハンドルを大きく《25°》切ってライダーが両足の爪先に力を加えないで:つまり δ=0 の状態にしたとき、本体をカーブの内側には -1.291°傾けなければならないとしてきましたが、本頁の新しい各定数の下でのその正確な値は、上記の連立方程式で δ=0°とすれば、【表2】の下から2段目の カーブの内側への本体傾き角「θd=-1.550°」として得られます。 右の*36プログラムで、連立方程式を構成する(43),(44),(45),(46),(47),(51)式は、3185~3190の各行の中にそのまま書いています。 この連立方程式を構成する6式の内、角度計算をする(43),(47),(51)式は、角度( θd と δ )が全て三角関数の中に入っているので《つまり転がり計算はされていないので》、プログラムの中で行われている様に 単位は [°] (degree)で計算しても構いません。 |
*36 Rtf と Rtb には、それぞれ計算してみたい数値を入れ、また、【表2】のハンドルを25°切った徐行(1m/sec)バンク時の計算には取り消し線なしの数字を適用し、後述の【表3】の高速バンク時の計算には緑の取り消し線の数値《Rtf=420,Rtb=61.5》または薄空色の取り消し線の数値《Rtf=Rtb=557》を適用、高速バンク時での「改良型前輪タイヤ」の計算には黄色の取り消し線の数値を適用します《ただし、計算結果である【表2】の中の黄色の数値は高速バンク時の値ではなく、【表2】の他の段の数値と同様、飽くまで徐行バンク時( δ=1.6929°)の数値です》。 →続き(補足) 3170 "Sdn" Rtf=61.5:Rtb=93.3:Rto=(Rtf*700.2+Rtb*731.3)/1431.5 :Lgrj=644.305:Lhtj=253.732:Lrpr=Lgrj-Rto:Lgm=782.52:NN=0 :Kh=3:Lgh=366.73:Lto=118.7:Rt=78.3 3172 degree:Sde=1.6929 :Lpt=Rto-Lttj:Fgh=156:Fgm=60:Mgh=156:Mgm=60:Mt=24:Fr=240:Mr=240 :Sca=26:Sd=0.376:Sdp=Sd Sde,Sd,Sdf(3172,3175行) は δ,θd,θdf の替り 3174 Lccn=(-50.339+Rtf*sin 10.677*cos 22.729+8.5)*1 3175 Lcco=Lccn*700.2/1431.5:Sdf=13:Rth=0 3177 "ReFkb" NN=NN+1 3178 if Rth=0 then 3185 3180 Sd=(Sd+Sdp)/2:if Sd<Sdf then 3185 3181 if Rth=0 then 3185:Zcf=Rth+(Rtf-Rth)*cos (Sd-Sdf) :Rto=(Zcf*700.2+Rtb*731.3)/1431.5 3183 Lcch=(Rtf-Rth)*sin (Sd-Sdf)*700.2/1431.5:Lcco=-Lcch 3185 Fkb=(Fgh+Fgm)*sqr(1+(tan Sde)^2*1 :Lhtr=Lhtj-(Fkb-Fgh)/Kh:Lrtr=((Mgm+Mgh)*Lhtr+Mgm*(Lgm-Lgh))/Mr 3187 Lrpr=Lrtr-Lpt:Lgrd=Lrpr*cos Sd+Rto 3190 Sdpp=Sdp:Sdp=Sd:Sdip=Sdi :Sd=atn ((Lcco+Lgrd*tan Sde)/(Lgrd-Rto)):Sdi=int(Sd*1000+0.5) 3195 print "Sd";Sdi/1000;"Lrpr=";int(Lrpr*100+0.5)/100;NN; 3196 if ABS (Sdi-Sdip)>1 then stop :goto "ReFkb" 3200 Lccc=Lccn+Rtf*Sd*π/180 :Lccd=(Lccc-Rtf*Sd*π/180+Rtf*tan Sd)*cos Sd :Kfd=-cos Sca*Lccd/Lgrd:Fgz=Fr*sin Sde 3201 Kbd=-Rtb*sin Sd/Lgrd 3203 Lwf=Rtf*sin Sd:Lwfh=(Rtf-Rth)*sin Sdf+Rth*sin Sd:Lwb=Rtb*sin Sd 3204 Fufo=-371.673:Fubo=-453.88 3205 Ftfo=569.40:Ftbo=1081.42 :Fszfo=Ftfo*Kfd/9.8:Fszbo=Ftbo*Kfd/9.8 :Fuzfo=Fufo*Kbd/9.8:Fuzbo=Fubo*Kbd/9.8 3207 Fwzfo=Fszfo+Fuzfo:Fwzbo=Fszbo+Fuzbo 3210 print "Fgz";int(Fgz*1000+0.5)/1000; ;"Fwzfo";int(Fwzfo*1000+0.5)/1000;"Fwzbo";int(Fwzbo*1000+0.5)/1000; 3212 print "Lccd";int(Lccd*1000+0.5)/1000; 3215 if Rth=0 then print "Lwf";int(Lwf*1000+0.5)/1000;:goto 3218 3216 print "Lwfh";int(Lwfh*1000+0.5)/1000;:goto 3219 3218 print "Rto";int(Rto*1000+0.5)/1000; 3219 print "Lwb":int(Lwb*1000+0.5)/1000 3220 end |
(*36)の補足 左のプログラム*36の、3172行の真のバンク角 Sde(δ) を「起き上がりこぼしバイク」の高速走行での最大バンク角:4.58°に変更し3174行のLccnを0に変更すると、このプログラムの解として【表1】と同じ θd=32.5884°,Fkb=191.31,Lrpr=94.712が得られます《Rtf=Rtb=557のとき》。このことは前項の表1の計算と本項の計算とでは計算方法が違いますが、相互に矛盾が無いことを示しています。 連立方程式の解が収斂したかどうかの判断は、3196行でSdの最小桁が 前の演算と1以下の違いである事を条件にしています。「改良型前輪タイヤ」のとき、3180行のSd=(Sd+Sdp)/2という計算を行なわない場合には解の一つであるSdが大きくなったり小さくなったりを繰り返して収斂に22回もの演算が必要です《3172行の仮入力値を Sd=32[°] にしたとき》。収斂の仕方がそうなる場合に、上記3180行の計算を行うと5回の演算で済みます。 収斂の過程でSdが大きくなったり小さくなったりを繰り返さない場合には、上記3180行の計算をしない方が速く収斂すると思われます。 収斂に必要な回数は計算の順番を入れ替えれば少なくなると思われますが、手っ取り早く上記計算で済ませました。 また、左のプログラムの中の |
| ●バイク横倒し力などの再チェック 前輪または後輪ロックの瞬間:t=0 に、慣性力の発生源《MfとMb》が在る本体中心面から離れたタイヤの接地点から極めて《?》大きい力を受けて停車しましたが、バイクが横倒れする速度の初期値を 0 としました。 しかし、「それで良いのかどうか」を再チェックの第一点として確認しておきます。 前頁【図22-c】には“力”のベクトルは画いてありませんが、全ての力は運動量《速度×質量》の変化によって生じ、その力の発生源《MfとMb》は本体中心面に在り、前・後輪のサスペンションの方向も本体中心面と一致している為 MfとMbの速度変化《つまり慣性力》の作用線も本体中心面内に在るので、その力自体に横倒しの働きが無いことは当然です。ところがその力を受け止める点:“前・後輪の接地点”は、本体中心面から離れた位置に在るので、もしもその点に瞬間的な“極めて”大きな力が加わったとしたら、t=0 の直後に車体が横倒れ速度を得た可能性が有り得ます。 しかし、質量:MfとMbが前進しようとしているときその方向などを瞬時に変える《つまり横倒れ速度を得る》ことが出来るのは、車体本体の“硬い”部分が 道路の縁石などの“硬い”物に「直接」接触したときだけです。上記「前・後輪の接地点」から、質量の有る点:MfとMbが運動量の変化を受けるのは、あくまでバネとダンパーを介しての力なので制限された有限の値です《→*36a》。従って、力を受ける点が本体中心から逸れた位置に在っても、MfとMbが瞬時に“倒れる方向に”速度を得る様な事はありません。 従ってバイクが倒れる速度は前頁で行なった計算の様に、t=0 の直後の初期値は 0 であり、質量およびバネとダンパーの力で決まる時間を掛けて横倒れの速度となる計算をすれば良いことが確認出来ます。 しかし、上記ロック前の運動エネルギーが「バイク横倒し」を引き起こす経路はフロント・フォークだけではありませんでした。 再チェックの第二点として、後輪の接地点Dに着眼します。 前輪ロックの場合の前輪タイヤは「路面を蹴る」という能動的な力を出したのに対し、この後輪接地点Dが出す力は路面を押さえる力が 等速走行時に比べて変化した《しかも減少した》だけなので、「車体を倒す力」としては見落としてきました。しかし、その「力の変化分」を受 ↗ |
け止める点Dが本体中心面から距離: Rtb*sin θd だけ離れた位置に在る為、車体を左・右どちらかに倒すモーメントとなるので、以下の計算ではこのモーメントも横倒しのモーメントとして加算します。因みに、このリア・サスペンションが出す力は、前頁の 本体中心面方向の「回転減衰振動」の運動方程式 (22)式の中の Kif と Rdf の値を求めるときに既にカウントされています。従って、その運動方程式の解《これは時間 t 経過後の 車体中心面方向の回転角 θ の値を示したもの》には何ら修正を加える必要はなく、前頁の (23)式をそのまま使う事が出来ます《→*36b》。 以下、前輪ロックの場合と後輪ロックの場合とでは変数の式は全く同じですが、適用される定数が異なるので、両者の場合を分けて解析します。 ●前輪ロックの場合の横倒し力 先ず、前輪ロックの場合の横倒し力として第一に 前頁で計算した「フロント・フォーク」の力を挙げます。 車体を真横から見て前頁【図22-c】の点Poを架空の回転軸として、t=0 以降 ライダー込みの車体が次式《前頁(23)式と同じ》の回転減衰振動をします《同図の左回転が θ>0 》。 θ=C1f *ε-αf *t *sin(wf*t ) (53) 《 C1f=0.122652[rad],αf=1.36098[/sec],wf=6.66842[rad/sec] 。前頁の値と同じ 》 前頁ではフロント・フォークが フロント・フォーク方向に路面を蹴る力《変化分》を前輪ロックのときFtf としていましたが、これからは横倒れ計算のプログラムと文字を同じにした方が良いので、前輪ロックと後輪ロックを共通の文字Ftxとし、前頁の(29),(30),(31)式に(53)式を代入すると次の様になります《フロント・フォークのバネの力Fkf,ダンパーの力Fdf も 共通の文字Fkx,Fdx を使います。後述の「横倒れ速度などの積分計算」の“プログラムの中では”、次の C1f ,wf ,αf 等の定数も 前輪ロックと後輪ロックを共通の文字 C1,Ww ,Ar 等を使います》。すると Fkx=Lsp*Kxs*C1f*ε-αf*t*sin St*Ksc (54) ↙ |
*36a バイクがライダーごと V1 で進んでいた「フロント・フォーク方向」の運動量が、t=0 の前・後で変化しない事は前頁の「前輪ロックの場合の現象」で前提した通りです。 しかし、前頁の注*19aで計算した様に「フロント・フォークと直角方向」の運動量は ロックの前・後で変わった値になっているので、フロント・フォークはそれと直角方向に「制限されていない極めて大きな力」を瞬時に受けました。しかし、その力のエネルギー《MfとMbの進行方向の運動エネルギー》の逃げ道が「フロント・フォーク方向」に開かれていたので、“ビクともしない”「フロント・フォークと直角方向」には何の動きも起こさないことはその注に書いておいた通りです。つまり、フロント・フォーク方向と直角な方向《ハンドル回転軸と直角方向》の極めて大きい力を瞬間的に受けた事は確かですが、「ハンドル回転軸方向の運動は止められてしまったので、バイクが倒れる方向の初速を得る事は無かった」と言えます。 *36b 前頁で行った「回転減衰振動」の解析は、前輪・後輪のバネとダンパーが出す力によってMfとMbが本体中心面内をどう動くかを計算しています。それはバネとダンパーが 中心面内のサスペンションの長さの変化だけによって決まる力を出していた計算です。従って、そのとき前輪と同様 後輪もその力の“足場”《踏ん張る点》が、中心面と直角方向の何処に在るかには関係なく力が発生しているので、前頁の「回転減衰振動」の解析はそのまま適用されます。 |
| Fdx=Lsp*Kxs*C1f*ε-αf*t*〔-αf*sin St+wf*cos St〕*Rsc (55) Ftx=Fkx+Fdx 《 St=wf*t 。以下の水色の数字は、前頁でフロント・フォークの中のバネの強さと制動係数を訂正した値です。 Ksc=13557.4[kg/sec2],Rsc=796.69[kg/sec] (前頁の値と同じ)。前輪ロックのときには Lsp,Kxs 等は、Lsp=1.21930[m],Kxs=0.716665です。 》 です。t=0 のときの前輪ロック時のFtx値をFtfoとすると Ftfo=Lsp*Kxs*C1f*〔wf〕*Rsc (56) = 569.395 となります。 前頁では徐行中に停止したときの「立ち転け」について詳しく解析 してきましたが、急カーブの“徐行中の停止”に限らず、直進後に“ハンドルを切って停止”する場合でも、停止する直前は遠心力と重力とがバランスしています《→*36c》。従って、その「立ち転け」の動作原理は全く同じです。その場合でもハンドルを切った側を『カーブの内側』,ハンドルを切った側と反対側を『カーブの外側』と統一して呼ぶことにします。 また、フロント・フォークは車体本体に対して後方にキャスター角 θca だけ傾いていて、前輪接地点Cが(42d)式の Lccd だけ本体中心面から離れているので、上記前輪の力Ftxに因る横倒しモーメント《カーブの内側に倒すモーメントを正とします》は -Ftx*cos θca*Lccd となり、このモーメントを線分GrGhoの長さ(Lgrd/cos δ)で割ると、Gr位置換算の「前輪横倒し力」《前輪ロックと後輪ロックを共通の文字Fszとします》《サフィックスの“z”は【図22-k】のZ方向を表します 》になりますが、徐行時の δ は θd と同様 小さい値であるので、cos δ=1 とし Fsz=-Ftx*cos θca*Lccd/Lgrd (57) となります。 従って、前輪タイヤの力Ftxを前輪横倒し力Fszに変換する係数を Kfd 《前輪ロックと後輪ロックを共通の値》とすると、(57)式から Kfd=Fsz/Ftx=-cos θca*Lccd/Lgrd 、 (58) ↗** |
*36c 今、ハンドルを左に切って停止する場合を考えます。 もしも車体本体が水平面に対して鉛直の状態(「直立状態」と表します)でハンドルを左に切って停止したら、ハンドルを切った時点で《 停止する前に 》、右に確実に転倒してしまいます。自転車に乗る人も同じですが、重いバイクに乗るライダーならそういう事は絶対にしません。 上記「ハンドルを左に切ったら“右に”転倒する」と言うことに対しては、「前輪接地点Cが本体中心面の右に“来る”のだから “左に”倒れるのが常識だ。自転車やバイクはそう出来ているからハンドルを切った方に曲がれるのだ」と反論する方がいると思います。 しかし、車体本体が直立しているのに ライダーはそうならない様にする為、「意識せずに」車体を左にバンクさせながら ハンドルを左に切り、停止直前の遠心力とバランスしてから ** ∴Fsz=Ftx*Kfd (59) となります《→*37》。ただし、Kfd は t=0 以降、θd の値の変化に応じて Lccd が変化するので、t=0 以降は定数ではありません《 t=0 以降、θd の値によって(40a)式の Lccc が変わり、(42d)式によって Lccd が変わる為です》。 t=0 のときのFszをFszfoとすると、 Fszfo=Ftfo*Kfd (60) となります。 次に、前輪ロックの場合の第二の横倒し力としてリア・サスペンションによる力を計算します。 急停止時に前輪サスペンション(フロント・フォーク)が縮むのに対してリア・サスペンションは伸び、前頁【図22-c】のMbは斜め上:( θu+θca+90° =29.964°)の方向に動きます。そのときの“斜め上方向に動く距離をバネの伸びに変換する”係数を Kuy 《前・後輪ロックで値が違うけれども、共通の文字を使います》とすると、前頁【図22-c】から Kuy=cos θbp (61) =0.499454 《 θbp=60.0361°(前輪ロック時の値)》 であるので、θ を[rad]で計算すると リア・サスペンションは ↙ |
*37 フロント・フォークの力Ftf又はFtbに、cos θca と、本体中心面から前輪接地点Cまでの距離 Lccd とを乗じた値の 右回転モーメントが発生し《 Lccd が正のとき》、そのモーメントを接地線分CDからGrまでの距離(Lgrd/cos δ )で割った値の力が、点Grに対し、線分GrGhoと直角の右方向(斜め右上方)に作用します。従って、Ftxを Fgzと同方向《左に倒す方向》の力:Fszに変換する係数としての Kfd は左記(本文)の様に Lccd に負の記号を付けなければなりません。 |
| 真上方向に Lbp*θ*Kuy だけ“伸び”《Lbp は前輪ロックの場合の値》、後輪サスペンションのバネの固さを Ku としているので、バネが後輪に対して出す力は Lbp*θ*Kuy*Ku だけ“小さく”なります。つまり、バネが路面をリア・サスペンション方向《斜め下》に押す力の変化分『Fku』は負の値となります。この式の θ に、(53)式を代入すると Fku=-Lbp*Kuy*C1f*ε-αf*t*sin St*Ku (62) となります《 St=wf*t ,Lbp(f)=1.22710》。 そのとき後輪のダンパーが伸びる速度は Lbp*(dθ/dt)で あるのでダンパーが後輪に対して出す力『Fdu』も負の値: -Lbp*dθ/dt*Kuy*Rzu となり、この式の θ に、(53 Fdu=-Lbp*Kuy*C1f*ε-αf*t *〔-αf *sin St+wf *cos St〕*Rzu (63) 《 前頁の(29)式と(30)式の中の Lsp,Kxs,Ksc,Rsc を、それぞれ Lbpf(前輪ロック時の Lbp ),-Kuyf,Ku,Rzu に入れ替えて となります。従って後輪がリア・サスペンション方向に押す力《斜め下方向を正とします》の力の変化分『Ftu』は Ftu=Fku+Fdu となります t=0 のときのFtuの値をFufoとすると Fufo=-Lbp*Kuy*C1f*〔wf〕*Rzu (64) = -371.673 となります。 後輪接地点Dは本体中心面から( Rtb*sin θd )の距離だけ内側に離れた位置に在るので、後輪接地点Dがバイクを内側に倒そうとするモーメントは -Ftu*Rtb*sin θd となります。 この横倒しモーメントは、“-Ftu”の値が正である場合に「カーブ ↗ |
の内側に」倒すモーメントが正になります。t=0 の直後は、上記の様に後輪のバネは伸びるので後輪の力の変化分Ftuは負の値となり《力が小さくなって「足すくみ」の状態になり》、“-Ftu”は必ず《ハンドルの切り角や前・後輪のどっちがロックするかに関係なく》正となるので、車体を「カーブの内側に倒す」モーメントになる訳です。 このモーメントを線分GrGhoの長さ(Lgrd/cos δ)で割ると、Gr位置換算の「後輪横倒し力」《前輪ロックと後輪ロックを共通の文字Fuzとします》になりますが、δ は小さい値であるので Fuz=-Ftu*Rtb*sin θd/Lgrd (65) となります。 従って、後輪タイヤの力Ftuを後輪横倒し力Fuzに変換する係数を『Kbd』《前輪ロックと後輪ロックを共通の文字》とすると、(65)式から Kbd=Fuz/Ftu=-Rtb*sin θd/Lgrd (66) Fuz=Ftu*Kbd (67) となります。ただし、Kfd は t=0 以降、θd の値が変化するので、t=0 以降は定数ではありません。 t=0 のときのFuzをFuzfoとすると、 Fuzfo=Fufo*Kbd (68) となります。 上述の前輪横倒し力Fszと後輪横倒し力Fuzとの和を『両輪横倒し力:Fwz』とすると《サフィックスの“w”は両輪合わせた値を意味します》、 Fwz=Fsz+Fuz (69) となります。 t=0 に於ける両輪横倒し力の値をFwzfoとすると、 Fwzfo=Fszfo+Fuzfo (70) となります。 次に、前輪ロックの場合の第三のバイク横倒し力として、前頁と同様傾きに因る力《重力》を加えます。 上述の(49)式の所で述べた総重心GrからGhoへの新引力の作用線の傾き(真の傾き角) δ に因る重力の、前頁【図22-k】のZ方向成分《前頁と同様Fgzとします》は Fgz=Fg*sin δ 《Fg=240 kgw》 《→*37a》 (71) であり、この力がそのままGr位置でのZ方向の横倒し力となります。 ↙ |
*37a t=0 以降の計算では、Kfd,Kbd が定数ではなくなるのと同様に タイヤの転がりによって δ も変化するので、δ の代わりに後述の Lrho という変数を使います。 |
| ●後輪ロックの場合の横倒し力 次に、 後輪ロックの場合の横倒し力として先ず第一に 前頁で計算した「フロント・フォーク」の力を挙げます。 車体を真横から見て前頁【図A-b】の点Poを架空の回転軸として、t=0 以降、ライダー込みの車体は次式の回転減衰振動をします《前頁の後輪ロックのときの運動方程式《(22b)式》の解:前頁(23b)式と同じ。ただし、(22b)式には、無視している項が有るので次の式は多少の誤差を含みます《→*37b》。》。 θ=C1b*ε-αb*t *sin(wb*t ) (53B) 《C1b=0.134013[rad],αb=3.08926[/sec],wb=9.7774[rad/sec] ,前頁の値と同じ》 すると、前頁の(31b),(29b),(30b)式から、フロント・フォークが路面を蹴る力のうち バネに因る力 Ftx,ダンパーに因る力Fdx、及びその和Ftx は Fkx=Lsp*Kxs*C1b*ε-αb*t*sin St*Ksc (54B) Fdx=Lsp*Kxs*C1b*ε-αb*t*〔-αb*sin St+wb*cos St〕*Rsc (55B) Ftx=Fkx+Fdx 《 St=wb*t 。以下の水色の数字は、前頁でフロント・フォークの中のバネの強さと制動係数を訂正した値です。 Ksc=13557.4[kg/sec2],Rsc=796.69[kg/sec] (前頁の値と同じ)。後輪ロックのときには Lsp,Kxs 等は、Lsp=0.85182[m],Kxs=1.216156です。 》 です。t=0 のときの前輪ロック時のFtx値をFtboとすると Ftbo=Lsp*Kxs*C1b*〔wb〕*Rsc (56B) = 1081.42 となります。 上記前輪の力Ftxに因る横倒しモーメント《カーブの内側に倒すモーメントを正とします》は -Ftx*cos θca*Lccd であるので、前輪ロックの場合と同様、前輪に因る横倒し力Fszは Fsz=-Ftx*cos θca*Lccd/Lgrd (57B) となります。 従って、前輪タイヤの力Ftxを前輪横倒し力に変換する係数:Kfd は、(57B)式から Kfd=Fsz/Ftx=-cos θca*Lccd/Lgrd 、 (58B) ∴Fsz=Ftx*Kfd (59B) となります。 ↗ |
t=0 のときのFszをFszboとすると、 Fszbo=Ftbo*Kfd (60B) となります。 次に後輪ロックの場合の第二の横倒し力としてリア・サスペンションによる力を計算します。 t=0 の直後からの上記Poを架空の回転軸とする回転減衰振動で、前頁【図A-b】の点Mbは斜め上:( 90-θbpb =48.255°)の方向に動くとき、その斜め上方向に動く距離を後輪バネの伸びに変換する係数 Kuy は、【図A-b】から Kuy=sin ( 90-θbpb )=cos ( θbpb ) =0.746115 (61B) 《 θbp=41.745°(後輪ロック時の値)》 です。すると前輪ロックの場合と同様、後輪サスペンションが路面を車体中心面方向に押さえ付ける力《斜め下方向を正とします》の変化分Ftuのうち、バネに因る力Fkuとダンパーに因る力Fduはそれぞれ次の様になります。 Fku=-Lbp*Kuy*C1b*ε-αb*t*sin St*Ku , (62B) Fdu=-Lbp*Kuy*C1b*ε-αb*t*〔-αb*sin St+wb*cos St〕*Rzu (63B) 《 前頁の(29)式と(30)式の中の Lsp,Kxs,Ksc,Rsc,C1f を、それぞれ Lbp,-Kuy,Ku,Rzu,C1b に入れ替えても、(62B),(63B)の2式と同じになります。St=wb*t 》 《 Lbp=0.62615[m],Ku=12617.5[kg/sec2],Rzu=741.46[kg/sec] 前頁の値と同じ 》 Ftu=Fku+Fdu 。 t=0 のときのFtu値をFuboとすると Fubo=-Lbp*Kuy*C1b*〔wb〕*Rzu (64B) = -453.880 となります。《今後、フロント・フォークの中のバネ定数と制動系数を改定した事を示す水色の文字背景の色は省略します》 後輪接地点Dは本体中心面から( Rtb*sin θd )の距離だけカーブの内側に離れた位置に在るので、後輪接地点Dがバイクをカーブの内側に倒そうとするモーメントは -Ftu*Rtb*sin θd となります。 この横倒しモーメントは、“-Ftu”の値が正である場合に ↙ |
*37b 前頁の注*31bでも述べた様に、t=0 以降 ピボットPzが後輪接地点Dの方向に引っ張られたり押したりする力が無くなった訳ではありません。例えば t=0 の直後には【図A-b】のVs,Vu が示す様にMf,Mbが共に図の左方向に動いているので、元に戻そうとする力が働いている筈です《でなけれが回転減衰振動にならず、MfとMbの慣性力でバイクは前進してしまいます》。その力は、バイクを水平・右方向に引き戻そうとする接地点Dの摩擦力です。 この、【図A-b】の水平・右方向の「摩擦力」と、回転減衰振動による「路面が後輪タイヤに対して出している力《これは後輪サスペンションの力の反作用です》の変化分」との合力が、ピボットPzを接地点Dの方向に引っ張る力として働きます。 ところが t=0 以降の「回転減衰振動」を決める前頁の微分方程式《(22b)式》の中には、このPzに働く力によるトルクは計算されていません。これは、トルク計算の点Poの位置は線分PzDに近い為《前頁の注*31b参照》、そのトルクは小さいので無視しているのです。 |
| 「カーブの内側に」倒すモーメントが正になりますが、t=0 の直後は、上記の様に後輪のバネは伸びるので後輪の力の変化分Ftuは負の値となり《力が小さくなって「足すくみ」の状態になり》、“-Ftu”は必ず《ハンドルの切り角や前・後輪のどっちがロックするかに関係なく》正となるので、車体を「カーブの内側に倒す」モーメントになる訳です。 このモーメントを 線分GrGhoの長さ(Lgrd/cos δ)で割ると、Gr位置換算の「後輪横倒し力」《前輪ロックと後輪ロックを共通の文字Fuzとします》になりますが、δ は小さい値であるので Fuz=-Ftu*Rtb*sin θd/Lgrd (65B) となります。 従って、後輪タイヤの力Ftuを後輪横倒し力Fuzに変換する係数を Kbd 《前輪ロックと後輪ロックを共通の文字》は、(65B)式から Kbd=Fuz/Ftu=-Rtb*sin θd/Lgrd 、 (66B) ∴Fuz=Ftu*Kbd (67B) となります。ただし、Kbd は t=0 以降は定数ではありません。 t=0 のときのFuzをFuzboとすると、 Fuzbo=Fubo*Kbd (68B) となります。 上述の前輪横倒し力Fszと後輪横倒し力Fuzとの和「両輪横倒し力」:Fwzは、 Fwz=Fsz+Fuz (69B) となります。 t=0 に於ける両輪横倒し力の値をFwzboとすると、 Fwzbo=Fszbo+Fuzbo (70B) となり、【表2】には その t=0 に於ける値Fwzboも、上述のFwzfo等と共に【表2】に載せています。【表2】にはFuzfoの値は書いて有りませんが、(Fwzfo-Fszfo)の値がFuzfoであり、(Fwzbo-Fszbo)の値がFuzboです。 次に、後輪ロックの場合の第三のバイク横倒し力として、前頁と同様傾きに因る力《重力》を加えます。 上述の(48)式の座標:Ymr の総重心GrからGhoへの新引力の作用線の傾き(真の傾き角) δ に因る重力の、【図54】のZz方向成分《前頁と同様Fgzとします》は ↗ |
Fgz=Fg*sin δ 《Fg=240 kgw》 《→*37c》 (71B) であり、この力がそのままGr位置でのZ方向の横倒し力となります。 この【表2】の最上段の「起き上がりこぼしバイク」 Rtf=Rtb=557.00mmの場合の前輪接地点Cから本体中心面までの距離 Lccd (312.813mm)の値は、従来のバイクの計算例《下から3段目、Lccd=-30.925mm》よりも一桁大きな値です。 この Lccd に比例して「前輪横倒し力」が大きくなるので、両輪横倒し力Fwzfo,Fwzboが、【表2】の最上段の値の様に非常に大きくなってしまい、この「起き上がりこぼしバイク」はハンドルを大きく切りながら急に停車すると確実に転倒してしまいます。これは「スタンドが無くても転ばない」などとは言っていられない、深刻な欠陥と言えます。 しかも真のバンク角 δ が 1.6929°になる様な、徐行して小回りするとき、「本体中心面を28.5°(見掛けのバンク角)も傾けなければならない」ので、乗り心地は悪そうだと言えます。 【表2】によれば、 Rtf=Rtb=350mmのバイクは、本体傾き角 θd =5.418°で済みます。つまり Rtf,Rtb が557/350=1.6倍しか違わないのに、θd は28.5°/5.418°=5.26倍も違うのは計算間違いだと思われるかもしれませんが、これは Rtf,Rtb=557mmのバイクはハンドルを25°切ってライダーが乗っても“起き上がりこぼしに近い”状態にある為、車体を5.26倍も傾けなければ真のバンク角が δ=1.6929°にならないのです。 しかし、その転ぶ方向は普通のバイクの様にカーブの内側にではなく、カーブの外側に転びます。これはハンドルを大きく切った徐行時の前輪接地点Cが 本体中心面よりカーブの内側《通常のバイクとは逆側》の位置になって、停止時に接地点Cがカーブの内側の路面を蹴るからです。 ↙ |
*37c t=0 以降の計算では、δ の代わりに後述の Lrho という変数を使います。 |
|
6.立ち転け無しバイク |
上記プログラム*36を部分的に変更して Rtf,Rtb と 高速走行時の真の最大バンク角:Sde(δ)を書き込んで連立方程式を解き、タイヤが外周面走行をするときに必要な片幅《前輪:『Lwf』,後輪:『Lwb』とします》等を載せたものが【表3】です《3172行のSd( θd )として予想される解に近い数値を書き込んで置くと解は早く収斂します》《高速バンク走行の計算なので、ハンドルを殆ど切らない状態のCの y座標:3174行のLccnは *0 にする必要が有ります 》。
表3 《改良型タイヤでない場合》 【表3】の6段のうち最上段は前記「起き上がりこぼしバイク」の最大(真の)バンク角4.5800°のときの値です。最下段は前頁の従来のバイク例で、真のバンク角25.446°で走行した場合ですが、このときの本体傾き角 θd の値は本頁【図46】の本体傾き角 θpa の計算値(28.881°)とほぼ一致しています。 【表3】の黄色の下段は「立ち転け無しバイク」の Rtf,Rtb にし、且つ真のバンク角を同じ値《25.446°》にしたときの値です。そのバンク角の外周面走行を確保する為に、前輪の幅が(270.42*2=)540.84mm と大きくなっていますが、それでも前輪を2つにするよりはメカが複雑にならず、従って車重も重くならないので有利だと思います。 とは言え、この様に前輪のタイヤ幅が広くなってしまうのは、余り好ましい事ではありません。 ↙ |
| ●改良型前輪タイヤ そこで、前輪タイヤの断面形状に工夫を加え、「立ち転け無しバイク」の性能を維持しながらタイヤ幅を殆ど広くしない事を考えます。 その「立ち転け無しバイク」が Rtf の値を大きくする必要が有るのは、徐行バンク時の急停車で転倒しない為であって、高速バンク走行時の為には特に Rtf は大きい値である必要はありません。 ハンドルを25°切って、真のバンク角 δ が1.6929°の徐行時に本体中心面を傾けなければならない角度 θd は【表2】によれば4.7358°だけですが、ハンドルを25°切る事による前輪の傾きは前頁の計算により10.677°なので、バイク本体の傾き4.7358°にその前輪の傾きが加わると前輪中心面は鉛直方向から凡そ13°くらい傾いているときまで曲率半径(Rtf )が420mmという大きい値でなければなりません《→*38》。 しかし、ハンドルを殆ど切らずに その13°以上にバンクする高速バンク時には、前輪幅は小さい値である方が、後述の計算で分かる様に本体中心面傾き角 θd が大きくならずに済みます。その Rtf が大きい値(420mm)の範囲の片側角度(13°)を【図54a】の様に『θdf』とします。 前章の 5.「立ち転けの可能性」 の解析では座標の値で計算してきましたが、これからの解析では停車時もバンク時《本体中心面傾き角 θd 》も 車体中心面からの距離で計算します。そして、作図を簡単にする為に、車体ではなく路面を傾けて図を描きます《【図54a】》。図中のC,Dは車体を最大限バンクさせて高速走行をしているときの前・後輪の接地点です。 【図54a】に示す様に、前輪中心面からの距離が Rtf*sin θdf よりも外側部分《つまり、前輪中心面から 420*sin13°=94.5 mm よりも外側の、【図】中の赤い短い曲線。→*38a》のタイヤ断面の曲率半径を小さく《その値を『Rth』とします》すれば、前輪タイヤの幅を余り大きくしなくて済みます。 以下に、高速時の必要な真のバンク角 δ を例えば上述の25.446°に決め、そのときの本体中心面傾き角(見掛けのバンク角) θd 等を連立方程式を立てて求めます。 高速バンク走行時《ハンドル切り角ほゞゼロ》に、前・後輪共にタイヤの最も外側の端で走行する程バンクさせたときの本体傾き角を【図54a】の様に θdm とすると、上述の本体中心面上の点Pcf《曲率半径 Rtf の中心》の、路面からの高さ『Zcf』《→*39》は【図54a】から Zcf=(Rtf-Rth)*cos(θdm-θdf)+Rth (72) ↙ |
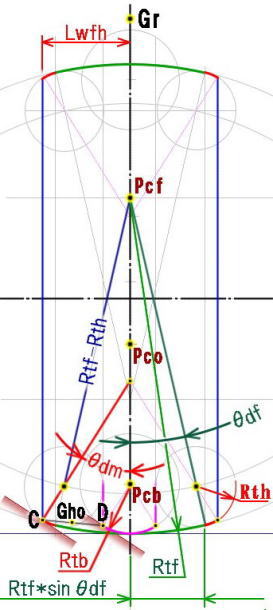 図54a (ハンドル切り角ほゞ 0°) |
*38 単純に足し算すれば 4.070+10.677=14.747°という値になりますが、傾く方向が少し違うので、そう単純ではありません。 キャスター角が26°のとき、ハンドルを25°切った直立状態では先ず前輪は鉛直面から10.677°だけ傾き、更に車体中心面が鉛直面から車体中心面と直角方向に4.7358°傾いたとき、前輪中心面が鉛直面からどれだけ傾いて接地するかは、ポケット・コンピュータで根気良く計算すれば求める事は出来る筈ですが、計算式で簡単に求める事は出来ません《その計算式が有りそうな気がしますが私は知りません》。 しかし、いま必要なのは前輪の曲率半径 Rtf である範囲をどれだけ大きく取るかが問題であり、その値は正確さを要求されていません。従って、ここでは上記の10.677°と4.7358°という方向の異なる傾きが合わさったとき、「前輪中心面が鉛直面から傾いた角度は13°程度である」と見做しました。つまり Rtf が420mmの場合には、本体中心面が4.7358°傾いたとき前輪中心面から420*sin 13°=94.479mmだけ離れた点が接地点Cとなると見做しました。 また、真のバンク角 δ=1.6929°になるときの中心面傾き角 θd:4.7358°は、タイヤ断面形状が単純であることが前提の計算ですが、今はタイヤの曲率半径が Rtf の面で接地しながらの徐行・バンク時に必要なタイヤ幅を知りたいので、計算結果【表2】がそのまま適用できます。 *38a 【表3】の上から2段目は、前輪断面の曲率半径が Rtf のときの最大傾き角 θd =13°で走行するときの真のバンク角 δ=8.2246°などを計算したものです。また、この後の計算である【表4】によれば、【図54a】の中の本体中心面傾け角 θd の最大値 θdm=32.290°で走行する場合《真のバンク角 25.446°》をも書き加えると、高速道路の曲率半径500mのカーブを曲がるときの時速は次の通り。 θd δ 時速: 13° 8.2246° 95.8 km/h 32.290° 25.446° 164.7 km/h 本体傾け角 θd が13°( θdf )から32.290°( θdm )までの広い範囲の走行を、【図54a】の中の赤い短い曲線の曲面で受け持たせるのは、高速走行時にタイヤが減り易いと心配する人がいると思います。 しかし、カーブの走行速度は真のバンク角のタンジェント《 tan δ 》の平方根に比例するので、そのバンク角(見掛けのバンク角が13~32.290°)で走る速度の範囲は狭く、図中の赤い曲線で走るチャンスは少ないのです《曲率半径が500m の高速道路の急カーブで、時速約 96~165 キロのときだけ 》。高速道路を走る機会の多い人でも、タイヤの中心面近くだけが減っているのを確認した人が多いと思います。 *39 θd が θdf よりも大きいときのPcfの高さ Zcf は、 Rtf よりも小さい値です。 |
| であり、一方Pcbの路面からの高さは Rtb であるので、線分PcfPcb上の 座標 x=0 に於ける点Pcoの路面からの“高さ”《前輪タイヤが前項の単純な形の場合と同様に「Rto」とします》《→*39a》は、(39)式の替りに Rto=(Zcf*700.2+Rtb*731.3)/1431.5 (73) となります。本体傾き角を再び変数 θd とすると、点Pcfの高さを示す Zcf は(72)式の θdm に θd を代入した Zcf です。 次に、バネに掛かる力 Fkb は前章《5.「立ち転けの可能性」》の(43)式と同じ Fkb=(Fgh+Fgm)*SQR(1+tan2δ )*cos(θd-δ ) (74) となり、Ggh~Gt間距離は (44)式と同じ Lhtr=Lhtj-(Fkb-Fgh)/Kh 、 (75) 上述の様にGgm,Ggh,Gtの重心がGrであることから、Gr~Gt間距離 Lrtr は、前項の(45)式と同じ Lrtr=〔(Mgm+Mgh)*Lhtr+Mgm*(Lgm-Lgh) 〕/Mr (76) となります。 【図52】でPtは車体本体中心面内に在って、GgmとGghに掛かる「新重力」を、伸び縮みするサスペンション経由でタイヤ側で受け止める点でした。 本項でも【図54a】のPcoは、GgmとGghに掛かる「新重力」を上記(74)式のバネの力 Fkb で受け止める車輪系側の点であり、且つ 線分PcfPcb上の前後方向Gr位置の点であるので、【図52】の点Ptに相当します。 従って、【図54a】のGr~Pco間距離を Lrpr とすると、前項の(46)式と同じ Lrpr=Lrtr-Lpt (77) であり、Grは点Pcoよりも Lrpr*cos θd だけ高い位置に在るので、Grの路面からの高さ:Lgrd は前項の(47)と同じ Lgrd=Lrpr*cos θd+Rto (78) となります。 次にこの高速バンク時《ハンドル切り角ほゞゼロ》に於いて総重心Grと接地線分CDとの、y軸方向の位置関係を計算します。 ↗ |
接地線分CD上の x=0 の点《車体前後方向で重心位置の点》を この改良型前輪タイヤの場合にもGhoとします。前輪タイヤの断面形状が単純な円形の場合にはGhoはPcoの真下に在りました《ハンドル切り角ほゞゼロなので、前章(41)式の Ygho と (42)式の Ypco はほゞ等しい》。前輪が【図54a】の特殊断面のタイヤの場合には、幾何学計算から 前輪接地点Cは点Pcfの真下よりも次の距離だけカーブの外側に来ます《 θd>θdf のとき》。 (Rtf-Rth)*sin(θd-θdf) 《ただし、【図54a】は最大バンク時の図であるので、θd を θdm としています》。 一方 後輪接地点DはPcbの真下に在る為、【図53】の前後方向位置関係から、線分CD上の点Ghoは 線分PcfPcb《本体中心面》上の点Pcoの真下よりも次の距離《 Lcch とします》だけカーブの外側に来ます。 Lcch=(Rtf-Rth)*sin (θd-θdf)*700.2/1431.5 (79) つまり、Pco~Gho間水平距離は Lcch となります。 また、車体傾き角が θd のときのGrとPcoとの高さの違いは上記の様に(Lgrd-Rto)であるので、 Gr~Pco間水平距離は (Lgrd-Rto)*tan θd です。Gr~Gho間水平距離は、Gr~Pco間水平距離とPco~Gho間水平距離とを足した値であるので (Lgrd-Rto)*tan θd+Lcch となり、Grからの「新引力」の作用線がGhoを通る為には、真のバンク角を δ とすると Lgrd*tan δ=(Lgrd-Rto)*tan θd+Lcch ∴(Lgrd-Rto)*tan θd=Lgrd*tan δ-Lcch ∴θd=tan-1〔(Lgrd*tan δ-Lcch)/(Lgrd-Rto)〕 でなければなりません。従って、θd を求める連立方程式のプログラムでは Lcco=-Lcch (80) として前章の(52)式 θd=tan-1〔(Lgrd*tan δ+Lcco)/(Lgrd-Rto)〕 (81) を計算すれば良いことが分かります。 以上の式(72)~(81)式までの連立方程式を解くことによって θd が確定します《この解を求めるプログラムも*36。繰り返し演算の順番は上記の通りではありません 》。 その高速バンク時の前輪接地点Cの 前輪中心面からの距離は |
*39a ここでの Rto は“R”という文字を使っていていますが半径ではなく、点Pcoの路面からの高さです《 (72),(73)式が示す様に傾き角 θd によって変化する高さです》。 |
| 次の値《 『Lwfh』 とします》となります。その値 Lwfh はそのバンク時に必要な前輪片幅でもあります《最大バンク時には、θd=θdm にします。また、後輪片幅は Lwb=Rtb*sin θdm 》。【図54a】から Lwfh=(Rtf-Rth)*sin θdf+Rth*sin θd 。 (82) この改良型タイヤによる高速バンク時の本体傾き角 θd を計算するには、プログラム*36の文字背景が黄色の訂正線の数値に変えればOKです。《ただしこの改良型前輪タイヤの場合でも、カーブ徐行時の計算では、3172行のSdeの値は1.6929°にします》。【表4】の様に真のバンク角25.446°を確保する場合、前輪幅(2*Lwfh )は219.9 mm で済むことが分かります。
●このバイクの急ブレーキ 【表4】の中の「立ち転け無しバイク」の前輪片幅が220mmというのは少し幅が広すぎる様に思うかもしれませんが、従来バイクの例として挙げてきた「ホーネット」の後輪幅は、仕様180mm(実測184mm)です。 道路で他車などと衝突しそうになったとき、最も頼りになるのは前ブレーキですが、これは急ブレーキのときには車体が前のめりになって前輪が路面を斜め下方に抑えつける力が大きくなり、タイヤの大きな摩擦力で「ブレーキが良く効く」からです。4輪の乗用車にもこの前のめり効果は有りますが、2輪の場合 前後の軸間距離の割に総重心の高さが高いので、特に前ブレーキが効くのです《後輪が浮く程の急ブレーキ時には後ブレーキは最初の時間帯にしか効きません》。 そのとき前輪タイヤの接地面近くのゴムには大きな歪が発生してゴム表面の一部が千切れたり熱が発生してゴムが溶けるなどして、スリップしてしまいます。 ↗ |
しかし、前輪の曲率半径 Rtf が大きいと、路面との接触面積が Rtf にほぼ比例して《極く大雑把ですが》増えるので、接触面の“単位面積当たりの”千切れや発熱に要するエネルギーが Rtf に反比例して小さくなり、前輪スリップが避けられる可能性が大きくなります《→*40》。 一般の通常バイクは後輪タイヤの方が太くなっていますが、「安全上は逆でなければならない」のではないでしょうか? また、この前輪が幅広の「立ち転け無しバイク」は上記の様に、「急ブレーキ時に前輪がスリップしにくい」という意味で、“走行中も転倒しにくい”と言えます。《→*41》 ●うっかり立ち転けの可能性 嘗て400ccのバイクで停止しているとき、真後ろを振り返った途端転んでしまった事が有ります。これは、両足を着いていても真後ろを振り返る様なとき車体が傾いた事に気が付きにくい為で、バランスの崩れに気が付いたときには通常の重いバイクでは、間に合わないという事が起きます。 この「立ち転け無しバイク」は、うっかり車体を傾けてしまったときに「起き上がりこぼしバイク」の様に「起き上がろうとする力」は有りませんが、タイヤの実効曲率半径:Rto が大きいので、同じ本体中心面傾き角に対して「倒れようとする力」が小さくなります。 この、ついうっかり車体を傾けてしまった状況は「バンク」と言う言葉は相応しくないので、そのときの線分GrGho傾きを、本体中心面の傾き角 θd と区別して「真の傾き角」《この用語は「P点立ち」の解析で、この頁の*6でも使いました》と呼ぶことにします。 【表5】は、ハンドルを切っていないので *36のプロクラムの3174行のLccnを*0(ゼロ)にし、「真の傾き角」を δ=1.6292° と書き込んで、3185行の遠心力《本文では(43h)式の tan2δ 》が*0になる様にピンクの訂正線に変更した場合に得られた θd 等の値を示しています《θdf=0,Rth=0 》。
↙ |
*40 ブレーキやバネ,ダンパー,ライダーの姿勢の変化等で吸収しきれなかった車体の運動エネルギーが、上記の一種の「千切れ」や「発熱」で吸収されるので、前輪の幅方曲率半径が大きい方が前輪はスリップし難いというのは、Rtf の大きいタイヤで実験した訳ではなく私の考察ですが、根拠は路面に残ったブレーキ痕とエネルギー保存の法則。 *41 走行中転倒の一つとして後輪スリップによるものが有ります。例えば緩い右カーブで左側のトラック等に接近してしまった場合、前輪スリップを恐れてリア・ブレーキを掛け過ぎると後輪がスリップしてして車体後部は直進しようとします。そのときライダーは車体をカーブの外側(トラック側)に倒さない様にするため無意識的にハンドルを、車体後部が進んでいる方向《直進方向》に切らざるを得なくるので、ますますトラックに接近してしまいます。 この様に、兎角後輪ブレーキに頼りがちなのは、前輪スリップに対する恐怖感が有るからなのですが、この前輪ブレーキに対する過度な警戒心を無くする為にも、前輪をスリップし難いタイヤ《 Rtf を大きくしたタイヤ》にしておく事は有利であると思います。 尚、余ほど大きくバンクしているとき以外は、走行中の後輪スリップ“自体”によって転倒するという事は有りません。 |
| この【表5】によると、傾きに因る横倒し力Fgzが同じ7.0902kgw になるときの本体傾き角 θd は、上段の「立ち転け無しバイク」では下段の通常のバイク例に比べて1.39倍(=2.6769°/1.925°)の本体傾き角になっています。つまり、真の傾き角 δ が同じだけ傾いたとき、「立ち転け無しバイク」の方が傾いた事に気が付き易いと言うことになります。 「1.39倍は大した比ではない」と思いがちです。しかし、通常のバイクの場合 本体傾き角 θd が1.9252°傾いた時点で「傾いた!」事に気が付いたとしてもその時には既にFgzが7.0902kgw も ↗ |
の大きさになっていて、その後 直ちに傾いた方の足を踏ん張って「倒すまい!」とする力を入れなければFgzは時間に対して2乗カーブで増え続けるので、上記1.39倍の違いは「倒れるか倒れないか」の違いとなります。 250cc以上の重いバイクで、しかも「足つき性」の悪い場合には、そんな僅かな傾き角にも早めに気が付かないと しょっちゅう転んでいなければなりません。 その点、「1.39倍という 本体傾き角の大きさ」は救いの女神になるのです。 ↙ |
| 7.横倒れの計算 ● t=0 以降の横倒れの力 ここで、再びハンドルを大きく切りながらの徐行中に停車して転倒《立ち転け》するときの、転倒速度の計算をします。 t=0 以降、前頁では横倒し力などの計算には線分CDを固定した回転軸として計算しましたが、本頁では前・後輪は横に転がって接地点C,Dが移動するので、Kfd,Kbd 等を定数とせず、時間 t で変化する傾き角 θd の関数として計算します。 ただし、時間の経過と共に総重心Grは車体中心面内を減衰振動しますが、その振動によるバネの伸び縮みで Lrpr (Gr~Pco間距離)が変化する長さは無視して t=0 のときの Lrpr の値を定数として使用して横倒れ計算をします。 いま、【図54】の様に本体がまだ大きく倒れていないとき《“車体がほゞ直立状態に近い”のとき》、中心面の傾き角が θd [rad] から微小角:dθ [rad] だけ増加して車体が倒れる場合の等価質量を計算します。 ライダー,車体本体,車輪系の各重心:Ggm,Ggh,Gtの路面からの高さをそれぞれ Hggm,Hggh,Hgtとすると、各3点は、「本体中心面内の実効曲率半径の中心Pco(路面からの高さ Rto )に対して相対的に」それぞれ( Hggm-Rto)*dθ,(Hggh-Rto)*dθ,(Hgt-Rto)*dθ だけ、【図】中のZzの方向に動きます《ただし、1/(cos θd )≒1 のとき》《→*41a》。 更に、前・後輪も角度 dθ だけ傾きを増すので、接地点C,Dも転がり移動をし、その移動距離はそれぞれ Rtf*dθ,Rtb*dθ であり、 ↗ |
前後方向の位置関係から、「Ghoの移動距離」は Rto*dθ だけ移動します。同様に「点Pcoの移動距離」も同じ Rto*dθ であるので《→*41b》、路面に対しての上記3つの重心移動距離は、「点Pcoに対して相対的に」移動する距離と「Ghoの移動距離」( Rto*dθ )とを足したものです。 従って各重心のZz方向への移動距離《路面に対する移動距離》は、それぞれ (Hggm-Rto)*dθ+Rto*dθ=Hggm*dθ , (Hggh-Rto)*dθ+Rto*dθ=Hggh*dθ , (Hgt-Rto)*dθ+Rto*dθ=Hgt*dθ となり、上記3つの重心移動は、路面上の点からそれぞれの重心までの高さに 本体の微小回転角 dθ を乗じた距離だけ動くことになります。 この、タイヤの転がりを考慮した3点の動きは、一見複雑に見えますが(y,z)座標の原点Oを単純な回転軸とした3点の動きと同じです《ただし、θd が大きく傾いてしまうとこの回転の中心は路面上の点Oではなくなります》。 従って、この3点から成る回転系のGr位置換算の等価質量《 Me とします》は次の値です《Lgm,Lgh,Lto,Rt などの詳細は↓*42》。 Me=〔Mgm*(Lgm+Lto+Rt)2+Mgh*(Lgh+Lto+Rt)2 +Mt*Lttj2〕/Lgrj2 (83) 《→*41c》 t=0 に於ける本体中心面の傾き角を『θd0』[rad] とし、線分GrGhoの長さを Lgrh とすると、Grの路面からの高さが Lgrd である ↙ |
*41a θd が小さい場合には、本体中心面上の斜辺の長さはその斜辺の高低差にほゞ等しいと言えます。点Pcoと座標(y,z)の原点Oとの間の長さはほゞ Rto であるので、Ggm,Ggh,Gt~Pco間距離は (Hggm-Rto), (Hggh-Rto), (Hgt-Rto) となります。その長さに dθ を乗ずると、Pcoに対するGgm,Ggh,Gtの各点の、Zzの方向の動きとなります。 *41b 本体中心面が dθ だけ傾きを増したとき、Ghoの移動は(41)式により Rto*dθ であり、Pcoの移動も(42)式により Rto*dθ です。 *41c Lgrj は 直立時の総重心Grの高さ。Lttj は Gtの高さ(=Hgt)。 |
| ので、 Lgrh=Lgrd/cos δ (84) です《δ は小さい値なので、横倒れ計算のプログラムでは Lgrh=Lgrd (2212行)としています》。 t=0 のときのGhoの真上の位置で 且つ路面からの高さ Lgrh の点を 【図54】の様に座標Zzの原点Oとし、そのとき( t=0 )のGrのZz座標の値《つまり 原点OからGrまでの曲線距離 》を『Zzo』とします。Grの y座標は“Pcoの y座標 Ypco《(42)式》 にGr~Pco間の水平距離《Lrpr*sin θd0》を足した値”であり、Zz座標の原点の y座標は(41)式の Ygho であるので、Grから Zz座標の原点までの距離:つまり Zzo の値は Zzo=(Ypco+Lrpr*sin θd0)-Ygho =(Rto*θd0+Lrpr*sin θd0)-(Lcco+Rto*θd0) =Lrpr*sin θd0-Lcco (85) となります《→*43》。 t=0 以降、タイヤが転がりながら中心面の傾きが増して、t=t のとき θd になり GrのZz座標が Zz になったとすると、その間《 t=0 から t=t まで》 線分GrPcoの上端Grは下端Pcoに対し相対的にZz方向に (Zz-Zzo) だけ動くので、傾き角 θd は (Zz-Zzo)/Lrpr [rad] だけ増加します。従って t=t のときの傾き角は θd=θd0+(Zz-Zzo)/Lrpr (85a) となります。 t=0 のとき《 θd=θd0 》、前輪接地点Cから本体中心面までの距離 Lccd 《Cが本体中心面よりもカーブの内側に在る場合、Lccd を正としています》は、θd0 が 1 [rad]よりも十分小さいので、(42d)式,(40a)式により Lccd=Lccc*cos θd0 =(Lccn+Rtf*θd0)*cos θd0 となります。t=t のとき、傾き角が θd [rad] に増えると、Cが路面上をカーブの内側に 距離 Rtf*(θd-θd0) だけ転がるので、t=t のときの Lccd は Lccd ≒〔Lccn+Rtf*θd0+Rtf*(θd-θd0)〕*cos θd =(Lccn+Rtf*θd)*cos θd (86) →* |
*42 GgmとGghとGtの動きはそれぞれの高さに比例する事が分かったので全体がGhoの位置を中心にした円運動に近い曲線運動となります。ただし、傾き角 θd は小さいものとします。また、GgmとGghとGtの各重心の位置を示す (83)式の中の Lgh,Rt は【図42-a】に示す距離の値であり、Lgm はGgmと同図中の点Pとの間の高さの差、Lto はライダーが乗ったときの同図中の Ltj の値です。 Lto=Ltj-Mgm/Kh=118.70mm 《Kh=3 kgw/mm》 その動きの、Gr位置に換算した等価質量 Me の実際の値は、【図42a】と、【図52】の下の数値(重心測定をしたときの数値)から Me=〔Mgm*(Lgm+Lto+Rt)2+Mgh*(Lgh+Lto+Rt)2+Mt*Lttj2〕/Lgrj2 =〔60*(782.52+118.70+Rt)2+156*(366.73+Rt)2+24*3302〕/644.3052 =264.00 kg となります《 Rtf=61.5,Rtb=93.3,Rt=77.745 mm 》。 この Me の値は Mr(240 kg)よりも10.0%大きい値です。 また、この Me の値は プログラム*36 及び横倒れ速度の積分計算《【図55】以下のグラフを画く為のプログラム》の中では、Rt=78.3mm としているので、その計算の中では Me=258.36kg で計算されています。従って、出られた計算結果《グラフ》も その Me の値(253.36kg )によるものです《 Rt=77.745mm にした方が全てに矛盾が無くなるのですが、大きな違いではないので Rt=78.3mm のときの重心位置による計算のままとします》。 この Me の計算方法では 車体本体の一部として路面スレスレの位置に重い部品が有ったとしても等価質量には加算されない事になります。しかし、この Me の計算方法に間違いは有りません。 理由:その路面スレスレの部品の場合、Pcoの動きと Pcoを中心にした回転の動きとが打ち消し合って対路面速度は 0 になるので、もしも車体本体の路面スレスレの位置に重い部品が有ったとしても その部品の質量は Me に加算されません。 ただし、車体本体質量 Mgh 等は 高い位置から低い位置までではなく、「一点に集中して在る」と仮定している事については、“近似計算”です。 * となります。 従って、そのとき《 t=t 》のフロント・フォークが路面を押さえ付ける力Ftxを、Gr位置換算のカーブの内側への横倒し力Fszに変換する係数 Kfd は ↙ |
*43 この Zo の値は t=0 のときの真のバンク角からの計算値 Lgrd*sin δ と一致します。 また、Gr~Pco間距離:(Ypco+Lrpr*sin θdo)もYgho も共に水平距離ですが、今計算しているのはまだバイクが大きく倒れていない状況の計算なので、曲線座標:Zzの初期値(Zo)は、上記水平距離の加減算で求めても誤差を無視する事が出来ます。 |
| Kfd=-cos θca*Lccd/Lgrh (87) となります。この t=0 以降 変化する Kfd によって、正確なFszを計算することが出来ます《→*43a》。 ∴Fsz=Ftx*Kfd (87a) 次に、前頁では計算に入れなかった t=0 以降の後輪サスペンションの力による横倒し力を計算します。 t=t のとき、後輪接地点Dは本体中心面から Rtb*sin θd だけカーブの内側に在ります。 従って、後輪サスペンションが路面に対して出す力Ftuを、Gr位置換算のカーブの内側への横倒し力Fuzに変換する係数 Kbd は Kbd=-Rtb*sin θd/Lgrh (87b) となります《この Kbd も t=0 以降、値が変化します》。 ∴Fuz=Ftu*Kbd (87c) 前・後両輪のサスペンションの力をGr位置に換算した両輪横倒し力Fwzは Fwz=Fsz+Fuz (88) となります。 次に 接地線分CD上の点Ghoの位置を計算して傾きに因る横倒し力を求めます。 いま、ハンドルを左に大きく切っているので、点Ghoの y座標 Ygho の、t=0 に於ける値を Yghoo とすると(41)式から Yghoo=Lcco+Rto*θd0 (89) です《Lcco=Lccn*700.2/1431.5・・・(40c)式。Lccn は直立時にハンドルを25°切ったときの前輪接地点Cの y座標。》。 t=0 以降、まだバイクが大きく倒れていないとしているので前輪の傾き角も小さく、改良型前輪タイヤの場合でも断面の曲率半径が Rtf の範囲内で接地しています。従って、上記 等価質量 Me の計算の所で述べた様に接地点C,Dが t=0 以降に転がることによって「Ghoが移動する距離」は Rto*(θd-θd0) (89a) であるので、移動後( t=t )のGhoの y座標 Ygho は(89), ↗ |
(89a)式から Ygho=Yghoo+Rto*(θd-θd0) =Lcco+Rto*θd (90) となります。 一方、t=t のとき本体中心面は θd [°] 傾いているので、【図54】のPcoの y座標 Ypco は(42)式から Ypco=Rto*θd (91) となります。 t=t のとき Gr~Pco間の水平距離は Lrpr*sin θd であり、Pco~Gho間の水平距離は Ypco-Ygho であるので、t=t に於ける Gr~Gho間水平距離《『Lrho』とします。GrがGhoよりもカーブの内側に在る場合を正となります》は Lrho=Lrpr*sin θd+(Ypco-Ygho) =Lrpr*sin θd+Rto*θd-(Lcco+Rto*θd) =Lrpr*sin θd-Lcco (92) となります。 Ghoは接地線分CD上の点であるので、CDを支点軸とするGrの重力 Fr に因る左回転のモーメントは Fr*Lrho となり、上記 Fr に因るモーメントの、【図54】のZz方向の、点Gr位置換算の力を再びFgz《カーブの内側に倒そうとする力を正》とすると、 Fgz=Fr*Lrho/Lgrh (93) となります《→*43b》。 つまり、重力に因り倒れるモーメントを計算するのに前頁では接地線分CDを、t=0 以降は固定した回転軸と見做していましたが、(92)式が示す様に t=0 以降の計算では接地線分CDが転がりによって移動することを計算に入れているので、正確な計算となります。 以上の両輪横倒し力Fwzと傾きに因る横倒し力Fgzとを足した力がトータルの横倒し力Ftzであるので Ftz=Fwz+Fgz (94) となります。 この力Ftzで Gr位置換算の等価質量 Me が加速され、【図54 】のZz方向の速度Vtzが変化し、そのVtzを積分すると距離が得られま ↙ |
*43a (58)式の Kfd の計算では t=0 のときは δ はまだ小さいので cos δ=1 としていますが、t=0 以降の Kfd を示す(87)式では cos δ の値を(84)式の中で計算に入れています。 また、(87)式の中の Lccd は、前輪が横に転がって Lccd が大きくなった後の値です。 *43b Rtf や Rtb をどんな値にしてもFgzを小さくする事は出来ません。ただし、停車前の速度V1を小さくするとか、停車前にハンドルを切った方と反対側《カーブの外側》の足に体重を掛けながら停止する等の方法は有りますが…。 |
| すが、その距離は、任意の固定した点《Pcoの様に動く点ではなく、任意の静止した点 》からの距離です。その「固定した点」を前頁と同様 ここでも上記の様にZz座標の原点としています。 従って、Vtzを時間 t で積分する時の Zz の初期値を上記 Zzo にして → |
Zz=Zz+Vtz*dt (95) の「横倒れの積分計算」をしていくと、【図55】以下のグラフが得られます《→*44》。 ↙ |
*44 この章での横倒れの積分計算をするときに使う「初期値」は、4章「起き上がりこぼしバイク」の中の「●立ち転けの可能性」での計算結果である【表2】の θd 《 t=0 のときの値なので θd0 です》を使います。 |
| ● 横倒れ速度などの積分計算 上記トータル横倒し力:Ftzを時間 t で積分すると、【図54】の曲線状の座標のZz方向(カーブの内側方向)へ倒れる速度などを計算する事が出来ます《本頁のFgzの計算は、前頁とは異なり、本章「6.横倒れの計算」の冒頭に述べた様に、t=0 以降のタイヤの転がり移動を計算に入れたものです 》。 その積分計算をする為に初期値を知る必要が有りますが、 ↗ |
前・後輪タイヤの曲率半径などを*36のプログラムに入力して実行すると、本体傾き角やサスペンションの伸び縮みによって変わる Lrpr 等の値が、【表2】の中の値として求められるので、その値を、次に示す横倒れの積分計算の初期値または定数としてポケット・コンピュータ内でそのまま引き継いで 計算すれば良い訳です。 ↓ |
| 以下は【図55】,【図56-1~3】,【図57】を画く為の「横倒れの積分計算」プログラムですが、注*36の、ハンドルを大きく切った状態の徐行・停止時のプログラムを実行した後の状態でこのプログラムを実行すると、このプログラムの為に各定数をキー・インする必要が有りませんが、このプログラムを実行する度に、その前に*36のプログラムを実行する必要が有ります。 24 goto "Integ.F" G.24 で前輪ロックの場合の計算を開始。長さの単位は [m]。 27 goto "Integ.B" G.27 で後輪ロックの場合の計算を開始。 2220行の2段目(2行目)の3つのSdをSd0に替えると、C,Dが転がらないときの計算となり、前頁のグラフ【図22-m】と寸分違わず一致します。 ただし、グラフ【図22-m】と全く同じ結果を得る為には、2220行の Lccd を前頁で使用した 30.939㎜ に変更し,2212行の Ksc を Ks=16782.5 に,Rsc を Rzs=986.21 に,Kuy*1 を *0 に,2220行の Ksc を Ks に し,2222行の Rsc を Rzs に,2226行の Me を Mr に変更する必要が有ります。また、Lgrj=680mmにするなど、*36 の上に書いて有る定数補正も必要です。 2210 "Integ.F" input "dt=? ";dT:Ar=1.36098:Wf=6.66842:Ww=Wf:C1=0.122652:Lsp=1.21930:Lbp=1.22710:Kxs=0.716665:Kuy=0.499454:goto "F.&B." (Ar ← α) Ar [ /sec] Ww [rad/sec] Lsp [m] 2211 "Integ.B" input "dt=? ";dT:Ar 2212 "F.&B." Sit=0:Tim=0:Firs=0:Ksc=13557.4:Rsc=796.69:Rzu=741.46:Lgrh=Lgrd/1000:radian :Sd0=Sd*π/180 L…=L…/1000 は単位を [mm] から [m] にする為。 :Lrpr=Lrpr*0.001:Lccn=Lccn*0.001:Lcco=Lccn*700.2/1431.5:Kuy=Kuy*1 2213 Zzo=Lrpr*sin Sd0-Lcco:Zz=Zzo:Rtf=Rtf/1000:Rtb=Rtb/1000:Rto=Rto*0.001:Rt=Rt*0.001:Lgrj=Lgrj*0.001:Lgm=Lgm*0.001:Lgh=Lgh*0.001 :Lto=Lto*0.001:Lttj=Lttj*0.001 ↖(85)式、 Ks[kg/sec2] Rzs[kg/sec] Zz[m] L…[m] Tim[sec] 2214 Sca=Sca*π/180:dZz=0:Vtz=0:Me=(Mgm*(Lgm+Lto+Rt)2+Mgh*(Lgh+Lto+Rt)2+Mt*Lttj2)/Lgrj2 :Ku=12617.5:Tstop=0:Timp=0:Tlast=1.2 Vtz[m/sec] (この行のTlast=1.2は、1.2まで計算することを意味) ,以下 Sd0等 角度は[rad] ,Mr[kg] 2215 "NEWS" Tim=Tim+dT*Firs: if Tim>Tstop+dT*0.5 then Tstop=Tstop+0.1:goto "P." ( if・・・が no の場合"Culc"へ) 2216 goto "Culc" 薄緑で printout される数値は全て時間更新する前の計算値。 2217 "P." print "sp14 t=";Timp;250+int(Timp*400+0.5);"Z";165+int(Zz*2000+0.5);int(Zz*1000+0.5)/10;"cm Fsz" (NewStopT) ( sp14 はスペース14個) ;165+int(Fsz/0.49+0.5);"Fuz";165+int(Fuz/0.49+0.5); (力F・・・の単位を[N]から[kgw]に変換して print。) 更新前の変数を printout した後、stop から出て"Culc" でTim が更新された計算を行なう。 2218 print ;"Fgz";165+int(Fgz/0.49+0.5);165+int(Fgz/2.45+0.5);int(Fgz/0.0098+0.5)/1000;"Ftz";165+int(Ftz/0.49+0.5);165+int(Ftz/2.45+0.5) ;int(Ftz/0.0098+0.5)/1000;"kgw "; 2217行の“250+……”はグラフの点の横位置を示す値、2217~2219行の“165+……”はグラフの点の縦位置を示す値。 2219 print "Vtz";165+int(Vtz*2000+0.5);165+int(Vtz*400+0.5);int(Vtz*100000+0.5)/1000;"cm/s":stop Vtz[m/sec] 2220 "Culc" Zz=Zz+dZz*Firs:St=Ww*Tim:Kex=Lsp*Kxs*C1*exp(-Ar*Tim):Fkx=Kex*sin St*Ksc:Sd=Sd0+(Zz-Zzo)/Lrpr (85a)式。濃い緑はFgzを計算する為のもの。 :Lrho=Lrpr*sin Sd-Lcco 2222 Fdx=Kex*(-Ar*sin St+Ww*cos St)*Rsc:Ftx=Fkx+Fdx:Kfd=-cos Sca*Lccd/Lgrh (87)式 :Fgz=Mr*Lrho/Lgrh*9.8:Fsz=Ftx*Kfd 力F…は[N] 2224 Keu=-Lbp*Kuy*C1*exp(-Ar*Tim):Fku=Keu*sin St*Ku:Fdu=Keu*(-Ar*sin St+Ww*cos St)*Rzu:Ftu=Fku+Fdu 2226 Kbd=-Rtb*sin Sd/Lgrh:Fuz=Ftu*Kbd:Fwz=Fsz+Fuz:Ftz=Fwz+Fgz:dVtz=Ftz*dT*Firs/Me 2227 dZz=(Vtz+dVtz*0.5)*dT:Vtz=Vtz+dVtz 2235 print "t =";Tim:Firs=1:if Tim<Tlast+dT/4 then "NEWS" 2240 end |
| 以下は前頁のグラフ【図22-m】を画いたときのプログラムです。 24 goto "Integ.F" G.24 で前輪ロックの場合の計算を開始。長さの単位は [m]。 27 goto "Integ.B" G.27 で後輪ロックの場合の計算を開始。 2210 "Integ.F" input "dt=? ";dT:Arf=1.59242:Wf=7.18755:C1f=0.113793:Lspf=1.2193:Kxsf=0.716665 (Ar ← α) :Ar=Arf:Ww=Wf:C1=C1f:Lsp=Lspf:Kxs=Kxsf:goto "F.&B." 2211 "Integ.B" input "dt=? ";dT:Arb=3.68645:Wb=10.5771:C1b=0.12388:Lspb=0.85182:Kxsb=1.216156 :Ar=Arb:Ww=Wb:C1=C1b:Lsp=Lspb:Kxs=Kxsb 2213 "F.&B." Sit=0:Tim=0:Firs=0:Ks=16782.5:Rzs=986.21:Zzo=0.020092:Lgrh=0.680:radian :Sd=Sd0*π/180:Lrpr/1000 :Lccn=Lccn/1000:Lcco=Lccn*700.2/1431.5:Zz=Zzo:Kfd=0.040894:Tlast=1 (この行のTlast=1は、1.0秒まで計算することを意味) 2214 dZz=0:dVtz=0:Vtz=0:Mr=240:Tstop=0:Timp=0:Sd=ATN(Zz/Lgrh):Tlast=1 2215 "NEWS" Tim=Tim+dT*Firs:if Tim>Tstop+dT*0.5 then Tstop=Tstop+0.1:print "sp14t";250+int(Timp*400+0.5);"Z";165+int(Zz*2000+0.5) ;"Fgz";165+int(Fgz/0.49+0.5) ;165+int(Fgz/2.45+0.5);:goto "P." (上の行の sp14 はスペース14個) ( if ・・・ が no の場合"Culc"へ ) 2216 goto "Culc" 2218 "P.":print int(Fgz/0.098+0.5)/100;"Ftz";165+int(Ftz/0.49+0.5);165+int(Ftz/2.45+0.5);int(Ftz/0.098+0.5)/100;"kgw " ;"Vtz";165+int(Vtz*2000+0.5);165+int;165;int(Vtz*400+0.5; 2219 print int(Vtz*100000+0.5)/1000;"cm/s";" t=";Timp;"Z=";int(Zz*1000+0.5)/10;"cm";165+int(Zz*400+0.5);"Fsz";165+int(Fsz/0.49+0.5):stop 2220 "Culc" Zz=Zz+dZz*Firs:St=Ww*Tim:Kex=Lsp*Kxs*C1*exp(-Ar*Tim):Fkx=Kex*sin St*Ks:Sz=Zz/Lgrh:Timp=Tim Sz=0.0295471 Fkx[kg*m/sec2=N] 2222 Fdx=Kex*(-Ar*sin St+Ww*cos St)*Rzs:Ftx=Fkx+Fdx:Kfd=0.040892:Fgz=Mr*9.8*sin Sz:Fsz=Ftx*Kfd:Ftz=Fsz+Fgz:dVtz=Ftz*dT*Firs/Mr 2227 dZz=(Vtz+dVtz*0.5)*dT:Vtz=Vtz+dVtz 2235 print "t =";Tim:Firs=1:if Tim<Tlast-dT/4 then "NEWS" 2240 end |
計算結果を以下のグラフに示します。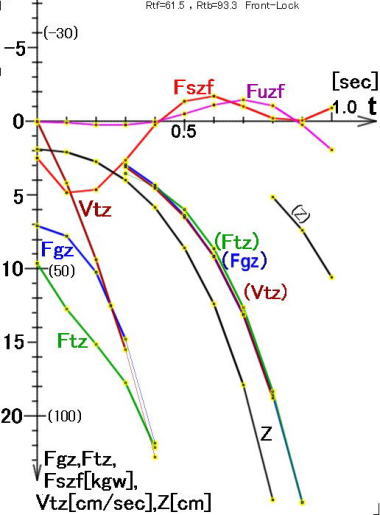 図55 従来バイク例の前輪ロックの新計算 |
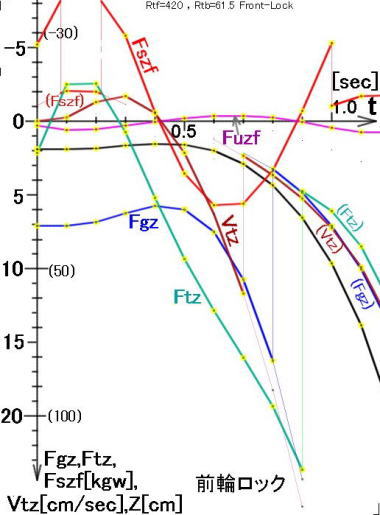 図56-1 立ち転け無しバイクの新計算 |
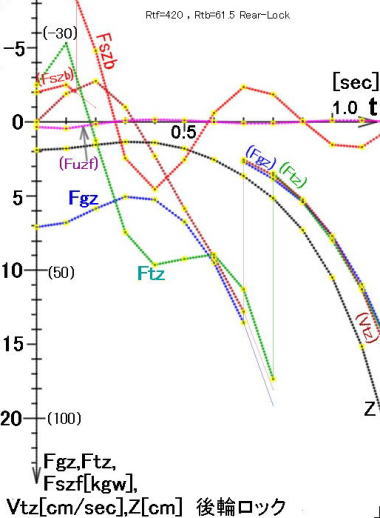 図56-2 立ち転け無しバイクの新計算 |
【図55】は Rtf=61.5,Rtb=93.3mm (通常バイク例)で、前輪ロックした場合です《ライダー込みの重心の高さ Lgrj=644.305mm 》。 横軸が時間 t。縦軸のZ(上記本文およびプログラム中のZzと同じ)が総重心GrのZz座標の値。Vtzがその方向に倒れる速度。Fsz(図中ではFszf),Fuz,Fgz,がGr位置換算の それぞれ前輪,後輪,重力に因る横倒し力。Ftzがそれら合計のトータル横倒し力です。 グラフを見ると、t=0 のときには後輪による横倒し力 Fuz は極く小さな値ですが、t=1.0secのときには大きくなっています。これは総重心Grの移動距離Zが大きくなって本体傾き角 θd が大きくなり、後輪接地点Dから車体中心面までの距離:Rtb*sin Sd が大きくなり、(87b)式の Kbd が大きくなって 後輪に因る横倒し力Fuzが【図55】の様に大きくなるのです。 前輪による横倒し力 Fsz は t=1.0のときFuzと極性が反転しています。これは t=1.0のときには 前輪の転がり距離:+Rtf*(Sd-Sdo)が 定数 Lccn(=-31.330mm)を打ち消して前輪接地点Cの位置が本体中心面の左にまで来て (86)式の Lccd の極性が逆転し、Lccd=+24.539mm になってしまった為です。 更に、上記の様に後輪が転がって Kbd の値(絶対値)が大きくなることも Fuz/Fsz の比率が大きくなる原因になっています。 前輪ロックと後輪ロックとの違いについてはグラフに載せていませんが、この転がり効果と後輪の力を計算に入れた新しい計算方法でも、前頁の計算と同様、大きな違いは有りません。 【図56-1】は Rtf=420,Rtb=61.5mm で、前輪ロックした場合です。 左の通常バイク【図55】と大きく違うのは t=0.4sec まで、前輪による横倒し力Fszfが負の値である為、前輪は「バイクを起こそうとする力」を出していることになり、【図】中のZが示す様にその間バイクは傾きを増さない為 重力に因る力Fgzが増えないので、0.7sec 経ってもトータル横倒し力Ftzは16.0kgw にしかならない事です《従来バイクの場合はFtz=63.2kgw 》。つまり、0.7sec 経った時点でも前者「立ち転け無しバイク」は確実に転倒を防ぐ事が出来ます。 【図56-2】は Rtf=420,Rtb=61.5mm で、後輪ロックした場合です。 【図56-3】は その両者の比較の為、後輪ロックの場合を薄く入 |
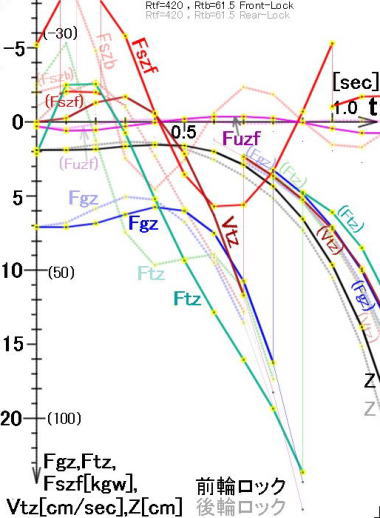 図56-3 立ち転け無しバイクの新計算 |
| れています。 Rtf=420,Rtb=61.5mm の場合の、前輪ロックと後輪ロックの数値比較は注《↓*45》と【表6】に書いて有ります。 この注*45の中の【表6】の停止後0.7秒後に0.1秒間で横倒れ速度Vtzを 0 にする力は前輪ロック,後輪ロック時に近似計算でそれぞれ31.1kgw,27.8kgw となりましたが、これは総重心Gr位置換算の値であるので、ハンドル位置換算ではもっと小さい値になり、更に、0.1秒よりも多い時間を掛ければ更に小さな力で済みます。 前頁の通常バイクではロック後0.5秒後が「転ばない為の限界」としましたが、この「立ち転け無しバイク」では0.7秒後でも十分間に合うということが分かります。 【図57】は 共に前輪ロックで、 濃い線は Rtf=420,Rtb=61.5mm , 薄い線は Rtf=380,Rtb=61.5mm です。両者ともに t=0.4sec までの時間帯に前輪に因る横倒し力Fszfが負の値である為、Fszfはバイクを「起こそうとする」力になります。しかし、両者のRtf の違いは 1.105倍(420/380)の違いですが、トータル横倒し力Ftzの違いは ●「立ち転け無しバイク」のまとめ 計算し始めた当初、この「立ち転け無しバイク」は「前輪ロック時の停車した瞬間、カーブの内側に倒れ掛かるけれども直ぐにバイク自身が直立する」ことが予想される書きましたが、ハンドルを切りながらの急停車時にライダーが何もしなければ矢張り倒れてしまうことが判りました《前輪タイヤ幅を更に広くすれば直立させる事も可能な筈です》。 しかし、【表2】の Rtf=420,Rtb=61.5mm の「立ち転け無しバイク」《決定的に重要なのは【表2】を見れば分かる様に“Rtf”です》は停車した瞬間《 t=0 のとき》本体中心面は「カーブの内側」に4.74°【表2】も傾いているので、その状態をライダーが何もしないで放置する事は有り得ません。 むしろ、【表2】の下から3段目の Rtf=61.5,Rtb=93.3mm の従来バイクの場合には「 t=0 の時点では本体傾き角 θd が0.376°しか傾いていない為 横倒し力Fgzが同じ7.09kgw もの大きさになっていることに気が付かない」《→*46》ので、ライダーは「バイクが ↙ |
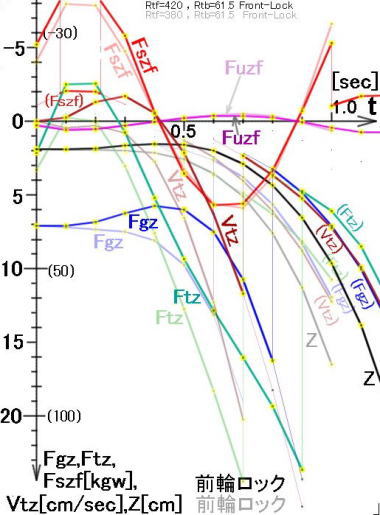 図57 立ち転け無しバイクで Rtf を変えたとき ( Rtf=380mm が薄いグラフ) |
*46 ハンドルを大きく左に切って停車したとき、Rtf=61.5,Rtb=93.3mm の従来バイク例では、【表2】の値が示す様に前輪接地点Cが本体中心面から右に距離 30.9mm 《 -Lccd 》の所に在る為、本体傾き角 θd が 0°に近くても真の傾き角 δ が1.6929°になり、Fgzが7.09kgw という大きな値になります。 一方 Rtf=420,Rtb=61.5mm の「立ち転け無しバイク」の場合には、 Rtf が大きく 前輪接地点Cは (86)式により本体中心面の左+64.5mm 《 +Lccd 》の位置に在るので、本体傾き角 θd を4.74°という大きな値にしないと、真の傾き角 δ が 1.6929°にならないのです。 |
| “全然傾いていない《 θd=0.376≒0°》”のに倒れてしまった」という、ライダーからすれば“原因不明の転倒”なのです。 つまり、通常バイクの例では“真の傾き角”は1.6929°傾いているので t=0 から傾く加速が行われているのに、「時間が経って“見掛けの傾き角”《車体中心面の傾き角》が実際に傾いてから“傾いた”」事に気が付くので、転倒し易い訳です。これはハンドルを切った状態のバイクが「ライダーを欺く現象」と言えます。 総じて言えることは、Rtf=420,Rtb=61.5mm の「立ち転け無しバイク」は、t=0 の時点で「傾いている《 θd=4.74°》」ことに気が付く事が出来、更に上述の「横倒れ引き留め力 Frz+Ftzが小さい値で済む」《↗*47》ことに加えて、【表5】の「真後ろを振り返った場合」等のうっかり立ち転けを起こしにくいことをも併せ考えると、本体が傾いているのを意識的に放置しない限り「立ち転けはしない」と断言して良いと思います。 *45 t=0 にバイクがライダーごと倒れ始めて、t=0.7sec にライダーが腰を浮かせて横倒れ速度Vtz〔 t=0.7 に於ける「Gr位置の点」《この「Gr位置」はライダー乗車時のGr位置》のZz方向の速度〕を0.1秒間で 0cm/sec にする為のGr位置換算の力をFrzとすると《ただし前頁と同様、Ftzなど他の力を 0 として計算しますが、前頁と異なりGr位置換算の力です》、 Frz=Vtz*Meo/0.1/9.8 [kgw] となります。ただし、Meo はバイクだけが接地線分CDを回転軸にして倒れるときのGr位置換算の等価質量です《ライダーが腰を浮かしても まだバネは伸びないとして計算。Lgrh はCD~Gr間距離》。 Meo=〔Mgh*(Lgh+Lto+Rt)2+Mt*Lttj2〕/Lgrh2 =126.163 [kg] 。 《 Rt=78.3 ,Lgrh=642.98/cos 1.6929°》 実際に横倒れ速度Vtzを 0.1秒間で 0cm/sec にする為には、その間に発生しているFtzを打ち消す力を必要としますが、そのFtzは t=0.7sec に発生している値が 0.1秒間 同じ値で続くと仮定すると、Gr位置換算の必要な力は Frz+Ftz となります。 すると Rtf=420,Rtb=61.5mm の場合、Gr位置《路面からの高さ643mm 》換算で、【表6】の右端の値が示す様に前輪ロックの場合31kgw,後輪ロックの場合28kgw の力で倒れるのを防ぐ《Vtzを 0 にする》事が出来ます。
|
*47 次の様に思う方がいると思います。「車体を殆ど傾けていない:つまり θd≒0 であるから遠心力を打ち消す力(Fgz)が発生してバランスが取れ、カーブが曲がれるのではないか」と。 しかし、上述の徐行・バンク時の本体傾き角 θd を求める*36のプログラムで、真のバンク角 δ に対する θd の値を求めると、ハンドル切り角25°,従来バイク例《Rtf=61.5,Rtb=93.3mm、》で δ = 0.846° 1.6929° 2.39° V = 0.707m/sec 1m/sec 1.19m/sec θd= -0.587° 0.376° +1.17° となります。この表の θd の値が示す様に、急カーブを徐行するときは必ず θd ≒0 になる訳ではなく、ライダーはそのときのスピードとカーブの曲率半径を見て、“真のバンク角 δ が必要な値になる様に”勘をも働かせて本体傾き角 θd を補正します《足を着かずに曲がるとき》。 あとがき 何処かのサイトで「転んで起こせなかったらJAF を呼べばいい」と言っていた人がいます。 それも“人生”ですが、何の役にも立たない蜃気楼の寸法を計算したり、年単位の時間を掛けて重心の位置を計算して「転ばない2輪車」を考えたりするのも“人生”だと思います。 このHPの連立方程式の解き方などは、仕事でもポケット・コンピュータが無かった頃は計算尺を使って、似た様な事をしていました。 その計算尺で最適な数値を追い詰めて行く感覚は、バッハのチェンバロやオルガン曲を聴いているときの様な、逃げようのない感覚と同じです。また、性能アップの為に数値を変えていってみると、ガラッと変わった新しい方法が見えてくる事も有ります《→*a》。 その最適な数値を追求していく過程の一つが「起き上がりこぼしバイク」だったのですが、結局これは珍奇ではあっても実用的ではない事が分かりました。しかし、その事を明らかにする過程で、到達した「立ち転け無しバイク」の「改良型タイヤ」ヴァージョンは、重いバイクのライダーの宿願を遂げるものではないかと思います。 その様に計算自体は楽しいことなのですが、バイクの改造を早く終わらせて 音楽を聴いたり旅行に出かけたいと思って、庭で蚊に刺されながら作業しているのに、人に「好きでなくっちゃ出来ない」などと言われると、カッと来てしまいます。 そんな改造をしなくても済む様に、バイクが「転ばない」様にしたバンパーや、傷が付いても錆びが広がらない、まともなメッキのバンパーを取り付けられる様にしたバイク《→*b》、更に、「立ち転け無し」のタイヤにしたバイクを発売して欲しいと思っています。 しかし、これから高齢化社会を迎えるのに、幾らメッキが良くてもハーレーの様な重たいバイクは頂けません。今回の改造で真のバンク可能角は約25.4°になってしまいましたが、市街地は勿論、山道の急カーブでも路面を擦った事は一度も有りません《→*c》。 軽くて馬力が有り、バンパーの取り付けオプションで好みのバンク可能角が選べる様な、転ばないバイクの発売が望まれます 。 終わり |
*a 上述の「起き上がりこぼし」バイクは、停車時にスタンドを使わなくても「転ばない2輪車」であり、法律的には調べていませんが路面も走れれないでもありません。 また、このバイクは「6.立ち転け無しバイク」の前(の黄色の部分)で解析した通り、徐行停止時に倒れ易い等の欠点があります。しかし、更に数値を変えていったとき「立ち転け無しバイク」の様なガラッと新しいものに到達する例と言えます。 *b 国産のバンパーの多くは、左右に分かれていて片側2本のネジだけで取り付ける様にした物ですが、あれは強度的に無理が有ります。やはり、左右がパイプで繋がっている等、走行中の転倒にも耐えられる構造でなければならないと思います。 また、メッキと下地の金属も粗末で、傷が付かなくても下地の錆でメッキが浮き上がって剥がれてきます。 *c 先日('15年9月)自動車教習所での交通安全教室を受けましたが、教習所のコースでは3回ほどP点が路面を擦ってしまいました。「ガッ!」という大きな音を立てるので、ああいうコースを走るのには不向きです。 |
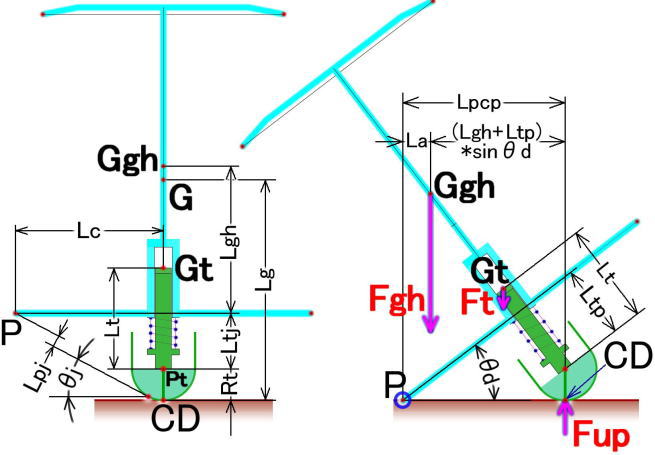
{kind=link}