トップページ(AIBO ERS-111 のバックアップ電池・交換)へ
トップページ(AIBO ERS-111 の経年劣化に伴う問題)へ
トップページ(AIBO ERS-111のバッテリーの軽量化の試み)へ
ある時No.3と4がおかしな動きを始めました。首を左右に激しく振り始め、いつまでたってもやめないのです。初めのうちは長時間そのまま放っておいたり、頭の上を押してほめてあげたり、やむを得ず胸のポーズボタンを押して一時動きをやめさせたら何とかもとに戻りました。そのうちどうにもその動作がひどくなったので対策を立てる必要に迫られました。最初、頭部のセンサーやその関係の電子部品の故障ではないかと思いました。別のERS-111の頭部モジュール(首から上)と交換してみました。また念のために他のERS-111のメモリースティックと差し替えてテストしてみました。その結果、どうやらメモリースティックかあるいはその中のファイルに原因があるように思われました。
いくつか試した後、自分の持っていたERS-111の中で一番相性のよさそうなものをコピーしました。その後はおかしな動きは現れなかったので効果があったようです。しかしこの時点では異常な首振り症状がソフト的なものなのか、あるいはハードに原因するものかまだ確定していませんでした。
何とか異常な首振りがおさまったNo.3ですが、2か月程たった頃別の症状が現れました。壁にぶつかる回数が増えその度3軸の加速度センサーが作動しているようで、やたら緊急停止するようになりました。加速度センサーは自分の仕事をしているだけだと思われました。問題は障害物を認識できていない点にありました。No.4でもタンスにぶつかることがたまに見られることがあります。ただ急停止はしないのでまだ軽いかと思います。
別のERS-111のメモリースティックを使って動かしてみました。やはりタンスにぶつかって電源オフとなりました。そこで別のERS-111の頭部(首から上)モジュールと交換して動かしてみました。するとどこにもぶつからないで歩行しました。どうやら壁にぶつかるのは赤外線方式の測距センサーかそれに関する回路が正しく作動していないことが原因のようでした。しかし予備の頭部分はありませんでしたので仕方なく他の手段をとることにしました。ノートPCのハードディスク内にオリジナルのメモリースティックの中身が保存してあったので、試しにそれに戻してみました。するとちゃんとタンスなどの障害物や壁の前では方向転換して問題なく動きました。一体ハードが故障したのか、それともソフトに原因があるのかわからなくなりました。しばらく様子を見ることにしました。
オリジナルのメモリースティクのファイルに戻してからしばらく安定した動作を見せていたNo.3ですが、ある時同じ動作ばかりを繰り返すようになりました。ちょっと体を前後させて音を出すのですが、これを際限なく繰り返すのです。これはNo.4でも見られたことなので初めは大して気にも留めないでいました。しかしあまりにも長時間続くのでなにかおかしいと思いました。第一、見ていても疲れるばかりです。そこで故障例1の時に使った別のERS-111のメモリースティックの中身ファイルを再度コピーして使ってみました。するとどうやら落ち着いたのです。しかし別な日にテストを兼ねて長時間作動させていた時またまたタンスにぶつかるようになってしまいあわててポーズボタンを押して止めました。短時間ならともかく長時間だとおかしな動きが出てくるようです。本体の温度があがると電子部品に影響が出ているのかもしれません。
おかしな動作が見られたら2種類のメモリースティックのファイルを交代で使うことでしばらく対処していました。なんとかだましだまし動かしている状態でした。原因としては
①ハードの劣化
頭部分にあるセンサーや電子部品の劣化が原因であり、例えばその部分の基板を交換することで直せるのかもしれません。
②メモリースティックそのもののハード的劣化によるもの
③メモリースティック内のソフトの不具合によるもの
などが考えられます。残念ながらアマチュアのアマチュアである私にはそれくらいの大まかな故障原因しかつきとめられません。
インターネットでERS-111関係を調べていた時、頭部モジュールの分解を紹介したホームページを見つけました。
http://www.ksky.ne.jp/~tom/analysis/operation1.html
電気・電子機器にかなり深い知識を持った専門の方のレポートのように思いました。その中に赤外線測距センサーの写真がありました。また型番が「SHARP GP2D12」と本文中に書いてあったので情報を集めてみました。現在では「GP2Y0A21YK」と型番は変更になっていますがそれが「GP2D12」の後継品であることがわかりました。価格も400~8,00円程で入手できることがわかりました。赤外線測距センサーと聞くととても高価な電子部品だろうと思っていたのであまりの低価格に驚きましたがこれが日本の技術力の現れの1つだろとあらためて思いました。
しかしレポートによるとセンサーは専用のコネクターではなくリード線を半田付けしてあるとのこと。単純な交換作業では済まない可能性があることがわかりました。しかし写真は初期の製品であり、これが量産品になると取り付け方も変わるかもしれないとのことでした。そこで一度ERS-111の頭部モジュールを分解して確かめる必要がでてきました。実際開けてみれば新品の赤外線測距センサーと交換できるかどうかがわかると思いました。
ヘッドモジュールの分解をする時次のホームページを参考にさせていただきました。
http://web.kyoto-inet.or.jp/people/nktks/TEMP1/otm2.html
・

本体から頭部モジュールをはずします。
・
・
・
・
・
・

両耳をとりはずします。はずした耳の部品は左右それぞれジップ袋に入れておくとなくしたりしなくてすみます。
・
・
・
・
・

頭部分解の作業①です。
・
・
・
・
・

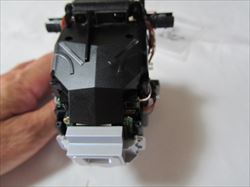
写真は頭部モジュールをひっくり返したところです。最初に後頭部の下側のネジ2本をはずします。
・
・
・
・
・

これは2つ目のネジ。
・
・
・
・
・

ネジ2本をはずしました。
・
・
・
・
・

ジップ袋にいれて作業①は終了です。
・
・
・
・
・

第②の作業です。
・
・
・
・
・

上あごの下のネジ2本をはずします。
・
・
・
・
・

2本目です。
・
・
・
・
・

2本のネジをはずしました。
・
・
・
・
・

②の作業終了です。
・
・
・
・
・

③の作業開始です。
・
・
・
・
・

キャノピーをはずします。なんとキャノピーの4本の柱を4つの受け穴に差し込んで固定されていました!
・
・
・
・
・

最初指ではさんで上に引き上げるようにすると少し隙間ができます。そこにマイナスドライバーの先を差し込んでねじるとさらに隙間が大きくなります。
・
・
・
・

かなりキャノピーがはずれてきました。
・
・
・
・
・

頭部モジュールと取り外したキャノピー。
・
・
・
・
・

・
・
・
・
・

キャノピーを固定する4本の柱です。
・
・
・
・
・

③の作業終了です。
・
・
・
・
・

④の作業開始です。
・

前方にある左右2本のネジをはずします。
・
・
・
・
・

これは右側のネジ。
・
・
・
・
・

④の作業終了です。
・
・
・
・
・
⑤の作業です。頭部のセンサーカバーを外します。
・
・
・
・
・

頭部の左右にある穴に差し込む形で止めてあります。カバーを左右に広げるようにするとうまく外れます。
・
・
・
・
・

頭部のセンサーカバーがはずれました。
・
・
・
・
・

バネが見えます。
・
・
・
・
・

センサーカバーの内側に左右2本の突起があります。
・
・
・
・
・

この突起があるので頭を押すとへこみ、センサーに動きが伝わる仕掛けです。
・
・
・
・
・

外側の大きいバネをとりはずします。
・
・
・
・
・

取り外したバネ。
・
・
・
・
・

中央の四角の」中に小さなバネが入っています。それを取り出します。
・
・
・
・
・

大きなバネと小さなバネです。
・
・
・
・
・

中央の四角の中にプラスチックの筒状の部品が入っています。それも取り出します。
・
・
・
・
・

取り出したプラスチックの筒状の部品です。
・
・
・
・
・

・
・
・
・
・

全部まとめてジップバッグに入れて⑤の作業は終了です。
・
・
・
・
・

⑥の作業開始です。
・
・
・
・
・

頭の上を覆うプラスチックのふたの左右のネジ2本をはずします。
・
・
・
・
・

2つ目のネジです。
・
・
・
・
・

ネジを外し終わりました。
・
・
・
・
・

⑥の作業終了です。
・
・
・
・
・

⑦の作業開始です。
・
・
・
・
・

ビニ頭モジュールを覆っている筐体を外します。
・
・
・
・
・

左側がはずれました。
・
・
・
・
・

中央から2つに割れる感じではずれました。
・
・
・
・
・

⑦の作業終了です。
・
・
・
・
・

⑧の作業開始です。
・
・
・
・
・
前方から見たところ。
・
・
・
・
・
・

ガラスの目玉が2つあるように見えるのが測距センサーです。向かって左が赤外線を発射するところで右側が受光部です。
・
・
・
・
・
・

センサーの上部に「SHARP GP2D12」とあります。
・
・
・
・
・
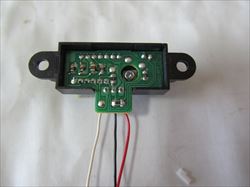
残測距センサーを裏から見たところ。
・
・
・
・
・

裏から全体を見たところ。
・
・
・
・
・

センサーの下部から3本のリード線がでています。
・
・
・
・
・

向かって左から白(電源供給)、中央が黒(GRN)、右が赤(出力)です。
・
・
・
・
・
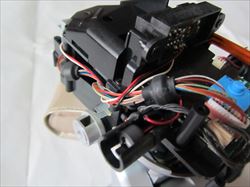
3本のリード線左下へ向かっています。
・
・
・
・
・

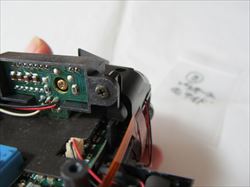
拡大したところ。
・
・
・
・
・

3本のリード線はCCDカメラの後にある基板のコネクターに接続されています。
・
・
・
・
・
・
⑧の作業終了です。
・
・
・
・
・

⑨の作業の開始です。赤外線測距センサーを外します。
・
・
・
・
・

センサー裏側の左右の2本のネジをはずします。
・
・
・
・
・

2本目のネジです。
・
・
・
・
・

センサーを取り外したところです。
・
・
・
・
・

センサーがぶら下がっています。
・
・
・
・
・

2本のネジをジップバッグにしまって⑨の作業は終了です。
・
・
・
・
・
⑩の作業の開始です。
・
・
・
・
・

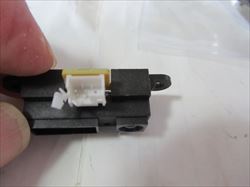
先ほど示した3本のリード線がつないであるコネクターです。
・
・
・
・
・

3本のリード線をまとめて指で挟んで引っ張るとコネクターが外れました。
・
・
・
・
・

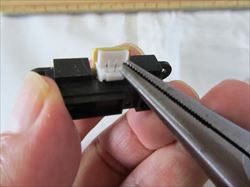
慎重にリード線をはずしていきます。
・
・
・
・
・
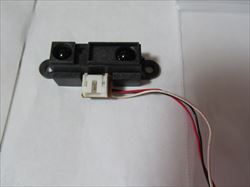
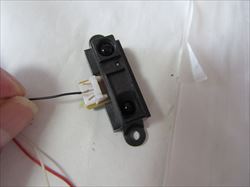
外し終わった赤外線測距センサーです。
・
・
・
・
・
全体です。
・
・
・
・
・
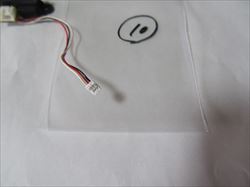
先端には専用のとても小さいコネクターがついています。⑩の作業の終了です。
・
・
・
・
・

⑪の作業開始です。
・
・
・
・
・

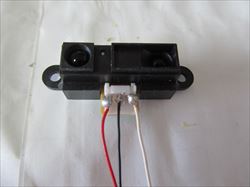
裏から見たところです。3本のリード線のうち左の白が電源DC5V供給用、真ん中の黒がGND、右の赤が出力用です。
・
・
・
・
・

半田ごてを使って白のリード線を外します。
・
・
・
・
・

外れました。
・
・
・
・
・

続いて右の赤のリード線を外します。
・
・
・
・
・

赤のリード線が外れました。
・
・
・
・
・

最後に中央の黒いリード線をはずします。
・
・
・
・
・

全部外れました。
・
・
・
・
・

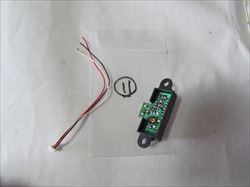
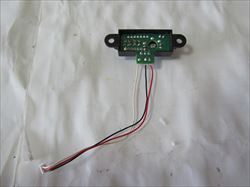
GP2D12と3本のリード線。
・
・
・
・
・
⑪の作業終了です。
・
・
・
・
・

⑫の作業開始です。
・
・
・
・
・

⑫の作業開始です。
・
・
・
・
・

インターネットで「秋月電子通商」から「GP2Y0A21YK」を2個購入しました。1個400円でした。シャープに問い合わせたら100%とはいえないけれどこれが「GP2D12」の後継品とのことでした。
・
・
・
・
・

中身は赤外線測距センサーとリード線と乾燥剤が入ってました。乾燥剤が入れてある点はやはり品質保持のためにかなり気を使っていることが窺えました。
・
・
・
・
・

「GP2Y0A21YK」は後継品ですが10数年たっても代替品(後継品)が存在することのありがたさを強く感じました。もしこれがなければ測距センサーの交換など最初からあきらめていたと思います。やはり日本のメーカーの技術力の高さの現れだと思いました。
・
・
・
・
・

裏から見たところです。
・
・
・
・
・

下から見たところ。
・
・
・
・
・

センサーは下にあるコネクターが基本的についているのですがERS-111の頭部モジュールには基板が一杯つまっており、このコネクター接続だと下がつかえてしまいます。それで実際にはコネクタ‐を経由せず基板の裏から直接3本のリード線を半田付けしてあります。
・
・
・
・
・

新しいセンサーと元のセンサーで使っていたリード線を組み合わせて使います。長さがちょうど合っていますし、リード線の先端に半田が残っているので半田付け作業がスムースに進むと思うからです。
・
・
・
・
・

表から見て左から赤(出力)、黒(GND)、白(DC5V)です。
・
・
・
・
・

裏から見ると、左から白(DC5V)、黒(GND)、赤(出力)となります。
・
・
・
・
・

⑫の作業終了です。
・
・
・
・
・

⑬の作業開始です。
・
・
・
・
・

「GP2D12」は基板の裏からリード線を引っぱってありました。しかし再度そこに新しいリード線を半田付けするのはかなり困難だと判断しました。間隔がとても狭いので手作業で通常の半田ごてでは無理だと思いました。そこでコネクターの中の3本のピンに接続することにしました。
・
・
・
・
・

ニッパ―を使ってコネクターの前の部分をカットします。
・
・
・
・
・
カットしている途中です。
・
・
・
・
・

実際には結構苦労しましたがなんとか切り取りが終わりました。
・
・
・
・
・

横から見たところ。3本のピンがむき出しになっています。
・
・
・
・
・
ラジオペンチで左右のピンを外側に曲げます。
・
・
・
・
・

外側のピンが八の字形に開きました。
・
・
・
・
・

⑬の作業終了です。
・
・
・
・
・

⑭の作業開始です。
・
・
・
・
・
コネクターの中のピンにリード線を半田付けしていきます。ここでは真ん中の黒を最初に半田付けする写真ですが実際には3本のうちやりやすそうなところからでいいと思います。
・
・
・
・
・

半田をつけ過ぎると仕上がりが団子になり隣とショートしやすくなります。かと言ってすくないとうまくくっつけられません。微妙な作業です。今回一番神経を使ったところです。
・
・
・
・
・
四苦八苦しましたがなんとか3本のリード線をピンに半田付けし終わりました。
・
・
・
・
・
裏返したところです。
・
・
・
・
・
全体。
・
・
・
・
・

⑭の作業終了です。
・
・
・
・
・

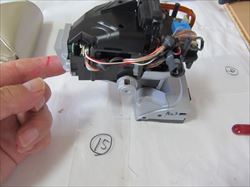
⑮の作業開始です。
・
・
・
・
・

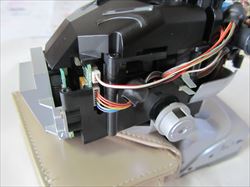
センサーを頭モジュールの基板に載せます。
・
・
・
・
・

全体から見たところ。
・
・
・
・
・

左右のネジで固定します。
・
・
・
・
・

リード線を左下におろします。。
・
・
・
・
・
CCDの裏にある基板のコネクターに接続します。
・
・
・
・
・

マイナスドライバーなどの先を使って押し込むとカチンとはまります。
・
・
・
・
・
⑮の作業終了です。
・
・
・
・
・
・
・
・
・
・

・
・
・
・
・
・

タンスに接近しました。
・
・
・
・
・

右を向きました。
・
・
・
・
・

右に向きを変え始めました。
・
・
・
・
・

向きを変えているところです。
・
・
・
・
・

衝突を避けて右に向きを変えることができました。赤外線測距センサーは正しく作動しているようです。
・
・
・
・
・
(状況)
最初は調子の良かったERS-111ですがだんだんおかしな動きをするようになってきました。予想していなかったので大変あせりました。赤外線測距センサーに原因があるように思われたのですがかなり大がかりな電子装置なのではないかと思っていました。どうてい修理は無理だろうというのが率直な感想でした。
(対応策)
しかしなかなか諦めきれず、インターネットでいろいろ情報を集めていたら、頭部モジュールの分解レポートを複数見つけました。すると実際大変そうな感じでやはり諦めていました。それでもなおやはり諦めきれず、プリントアウトした資料をよく見たら赤外線測距センサーの型番がわかったのでさらに調べました。すると赤外線測距センサーはとても小さいデバイスでしかも安価で市販されていることがわかりました。そして手持ちのERS-111の頭部モジュールを分解してみました。すると意外に簡単に新しいセンサーと交換できそうに思われてきました。
(感想)
まさか自分で赤外線測距センサーの交換ができるとは夢にも思いませんでした。一番驚いたのは相当大きな電子部品なんだろうと思っていたのですが実際には小さな電子部品1個で成り立っていたことです。日本の電子工学の技術の高さに驚きました。ありがたいことに後継品が入手できる状態だったのもラッキーでした。異常な首振りや同じ動作の反復もまだ少しあるようですが気になるほどではありません。どこまで赤外線測距センサーの交換で治ったかは不明ですが、少なくともそれまでやたらタンスにぶつかっていたNo.3がちゃんとよけて通るようになったことがとてもうれしかったです。
この赤外線測距センサーの交換レポートは私が個人的に経験したことを何かお役に立つかもしれないと思って公開したものです。ここで得た情報(後記の部分を含みます)を参考にして実際に赤外線測距センサーの交換などを行ったりその他何かを実行される時はすべて『自己責任』にてお願いします。
・
・
・
ERS-111には赤外線測距センサーが装備されてあり壁などの位置を認識してぶつからないように避けて通る仕組みが備わっています。しかし時折、その機能が働いていないような場面に出会いました。ベランダのガラス戸にぶつかることがあり最初はセンサーの故障かと思っていました。しかしセンサーを交換してもその現象は起きました。そこでセンサーからの情報を処理する電子部品の故障かとも思いました。しかしある時、ガラス特有のものが関係しているのではないかと思い試してみました。

室内の床から12センチより上がガラス戸になっています。時折ERS-111がぶつかっていることがあります。常にという訳ではないのですが起きる時は何回やってもぶつかりっぱなしです。正確に言うとガラスそのものではなくその手前の木の枠の前で足踏みをしています。ぶつかっているのはその木の枠なのですが頭にある赤外線センサーの位置関係から言うと当然ガラスから遠ざからないといけないはずです。と言うことは木の枠にぶつかる前に向きを変えていないといけないはずです。
・
・
・
・
・
・

本来なら赤外線センサーが働いて障害物を認識して向きを変えて避けるはずです。
・
・
・
・
・
・

部屋の中から外を見たところです。
・
・
・
・
・
・

カーテンを下してみました。
・
・
・
・
・

右側を向きました。
・
・
・
・
・
・

そして右に向きを変え始めました。
・
・
・
・
・
・

完全に右に向きを変えました。
・
・
・
・
・
・

さらに向きを変えています。
・
・
・
・
・
・

ついにガラス窓から遠ざかっていきます。注意すべきことはしきりにガラス戸にぶつかっていた時カーテンを下すと一瞬動きを止めてその後向きを変え始めたことです。明らかにガラス戸に対する反応とは異なった反応を示しました。ガラス戸よりもカーテンの方が認識しやすかったことは確かです。
・
・
・
・
・
・

高さ27センチの壁をダンボールで作ってみました。
・
・
・
・
・

向きを変え始めました。
・
・
・
・
・

横を向きました。
・
・
・
・
・

斜めになりました。
・
・
・
・
・
・

完全に窓に背を向けました。
・
・
・
・
・
・

窓から立ち去ってしまいました。
・
・
・
・
・
・

写真は頭部モジュールの高さを測ったところです。赤外線測距センサーは床から20~25㎝位の位置にあるようです。そこから赤外線を射出して対象物からの反射波をとらえて距離を算出する仕掛けになっています。そのセンサーが機能していない原因はなんだろうと考えました。カーテンを下したりダンボールで壁を作っている時は向きを変えるのでカーテンやダンボールは対象物として認識されていることがわかります。けれどガラス窓だけの時は障害物として認識されていないことになります。赤外線がガラスを透過してしまうのが原因ではないかと思いました。頭部モジュールにはキャノピー(顔面部分の覆い)がついていますがその内側にあるセンサーから発射された赤外線はそのキャノピーを透過して対象に射出されているはずです。ですからガラス戸も透過しているのではないでしょうか。
・

念のため夜に同じテストをしてみました。外は暗い状態です。
・
・
・
・
・

ERS-111は向きを変え始めました。
・
・
・
・
・

さらに右方向をさぐっているようです。
・
・
・
・
・

完全に右向きになりました。ガラス戸を障害物として認識したようです。
・
・
・
・
・

再度のテストです。
・
・
・
・
・

外の様子を探っている感じです。
・
・
・
・
・

右側のスペースを確かめているようです。
・
・
・
・
・

右側に向きを変え始めました。
・
・
・
・
・

横向きになりました。昼間と異なりガラス戸を壁として認識したようです。
・
・
・
・
・
あるERS-111がある時期からしばしばタンスや室内の壁にぶつかるようになりました。赤外線センサーの故障かと思ったので交換することにしました。写真は取り外したシャープ製赤外線センサー「GP2D12」です。
・
・
・
・
・
これは「GP2D12」の代替品とされている同じくシャープ製の「GP2Y0A21YK」です。これと交換しました。するとタンスなどはよけるようになりましたがガラス戸にぶつかる事象は時折起きていました。考察①では原因はガラスにあると思っていたのですが、夜間に行ったテストではガラス戸の前で向きを変えていました。
・
・
・
・
・
シャープ製赤外線測距センサー「GP2Y0A21YK」の仕様書に次のような記述がありました。
「特性への影響に関する注意
7-4 受光面に、太陽・タングステンランプ等光源からの光が直接入射すると、正確に測距できない事がありますので、当該光源から直接光が入射しないよう設計上の配慮をして下さい。
7-5 鏡面反射物との距離は、正確に測距できない場合があります。鏡面反射物との角度を調整すると測距できるようになる場合もあります。
7-6 反射物に、材質・色等が極端に違う境界線がある場合、正確に測距できない事があります。この様な場合、境界線の向きを、受発光レンズのセンター間を結ぶ直線と平行になる様に設置すれば、測距誤差を低減する事ができます。」
・
・
・
・
・
これかの情報から考えられることは赤外線測距センサーや関連電子部品の故障ではない時でも何らかの原因で正確に測距できないことがあるということです。ガラスが透明であることやベランダから差し込んでくる外光の影響もありえそうです。
・
・
・
・
・

ガラス戸を通して入ってくる外光に含まれる赤外線の影響があってそのために正しい測距ができない状態になるのではないかと思いました。ベランダからの外光は光源からの直接の入射光ではないのでそれほど強い光だとは思えません。しかし昼と夜で反応の仕方が異なることは外光の影響を考えざるをえません。
・
・
・
・
・

晴天の日に比べ曇りの日にはガラス戸にぶつかるような現象はあまりみられないように思います。何台かのERS-111で試してみましたが確かに晴天時と曇天時で反応が異なりました。
・
・
・
・
・
原因が今一つはっきりしません。そこでインターネットでもう少し情報を集めたいと思いました。シャープ製赤外線測距センサー「GP2Y0A21YK」の向かって右側の丸い部分が赤外線を発射する部分(LED)で左側の丸い部分が受光部(PSD)です。仕様書によると発せられる赤外線の波長は870nmです。これは0.87μmとも表記されます。0.00087mmと同じです。そこで波長による光の分類を調べました。いくつかの表記がありましたのでもっとも一般的と思われるものを選びました。
紫外線 0.14μm~0.4μm
可視光線 0.4μm~0.8μm
近赤外線 0.8μm~4.0μm
遠赤外線 4.0μm~1000μm
マイクロ波 1000μm~
するとここで使用されている赤外線LEDは近赤外線を発光しているものでした。しかも近赤外線の領域内でも可視光線に極めて近いところに位置していることがわかりました。そこで近赤外線について調べました。
近赤外線の特徴
・赤色の可視光線に近い波長をもっている。そのため可視光線に近い特性を持つ。
・われわれの身のまわりにあるたいていの物質は近赤外線をほとんど吸収しないのでたいていの物質を透過する。
・人の皮膚の表面から数ミリの深さまで浸透する。
そこで可視光線とガラスの関係について調べました。
可視光線
・ガラスは可視光域の透過率が100%近い。吸収率は0に近い。
そこで光の透過・吸収・反射について調べました。
光の反射・吸収・透過
・物体に入射した光は一部が反射され、一部が透過し、一部が吸収される。
・反射率 A% + 透過率 B% + 吸収率 C% = 100% となる。
そこで反射率について調べました。
物質表面での反射率
水・・・2%
ガラス・・・4%
ダイヤモンド・・・18%
シリコン・・・31%
と言うことはガラスは可視光線の場合透過率がきわめて高いということになります。もし吸収率が非常に小さいとすると可視光線のほとんどがガラスを透過して反射して戻ってくるものはかなり少ないことになります。また次のような情報もありました。。
透明な板ガラスでは太陽光の0.3~2.7μm(紫外線~可視光線~近赤外線)はよく透過する。厚さ3mmの板ガラスで80%ほどの透過率。2.7μmm以上だと透過率は30%以下になる。と言うことは測距センサーから射出された近赤外線も外からの太陽光に含まれる近赤外線も同じようにガラスを容易に透過することになります。
また建築用だと思われますが「各種材料反射率」という項目で検索すると
水面・・・2%
透明ガラス・・・10~12%
障子紙・・・30~50%
壁紙(淡色)・・・40~70%
壁紙(濃色)・・・20~40%
色付ラッカー、ニス・・・20~40%
というものがありました。先程のガラスとは異なっていますが室内の壁やタンスなどに比べると透明ガラスはやはり反射率が低いことがわかります。透明ガラスはその反射光の率の低さから見ても測距しやすい対象物とは言い切れないようです。
太陽光
太陽光の波長はだいたい0.3~2.5μmということなので、紫外線(0.14~0.4μm)、可視光(0.4~0.8μm)、近赤外線(0.8~4.0μm)の範囲にあります。しかし遠赤外線(4.0~1,000μm)は太陽光にはほとんど含まれていません。
PSD
Position Sensitive Detecotor の略で距離測定素子という意味です。赤外線測距センサーに組み込まれているLEDはある決まった角度で近赤外線を発射しますがその角度は固定されています。また反射してきた近赤外線をPSDで受信するわけですがLEDとPSDの距離も固定されています。従ってPSDに戻ってきた近赤外線の角度がわかれば三角測量の定義により赤外線測距センサーと対象物との距離がわかる仕組みです。三角形の一辺の長さとその両端の角度がわかればその三角形の形状がわかることの応用だと思われます。さらに同じ角度で発射されても近くにある対象物からの反射光の角度より遠いうの対象物から戻ってきた反射光の方が大きい入射角になります。簡単に言うと近くの対象物からの反射光はLED側からみてPSD内のより遠い位置へ、また遠くの対象物からの反射光はLED側からみてPSD内のより近い位置へ戻ってきます。戻ってきた位置から逆算してその入射角度を算出する仕組みのようです。PSD本体は10ミリ×10ミリ程の大きさしかないようですが半導体素子の常識からいうとかなり大きな部類に入るそうです。受信部にあたるPSD側の測定で誤差を生じやすいのは本来期待していたのとは異なった他の乱反射光が入ってきた場合や対象物が極端に反射率が高かったり低すぎる場合や透明な場合などがあるそうです。
(注1) ここでの波長の区分などはいくつかある分類法のうちごく一般的と思われる大よその区分を利用しました。
(お断り) 本来はそれぞれの情報の引用先を明確にすべきかとも思いましたがここではごく一般的な情報にとどめましたので特に引用先を明示しませんでした。
赤外線センサーはLEDから赤外線を発射してそれを受光部のPSDで受け取った時の情報で対象物との距離を割り出す仕組みです。しかも使用されている近赤外線の波長はかなり可視光線に近いのでERS-111の顔面部の覆い(キャノピー)を透過して対象に照射されます。テレビ台の下のブルーレイレコーダーをリモコンで操作する時など扉のガラス戸を閉めた状態でも作動可能なことからも近赤外線がガラスを透過して作用していることが理解されます。赤外線測距センサーでは反射してきた少しばかりの近赤外線を受光部PSDでキャッチすることになります。従って近赤外線がどれくらい反射されるかは重要な要素だと考えられます。反射率の低い透明なガラスが対象の場合は他の材料の時より厳しい条件で測距作業を行っていることになります。さらに晴天時は外から太陽光に含まれている近赤外線がPSDに入りこんで正確な測距作業の妨げとなっている可能性も考えられます。
ガラス窓のカーテンを下したりダンボールで内側に壁を作ると外光の影響が減少すると同時に、カーテンやダンボールの方がガラスより反射率が高いようですので測距性能を向上させているのかもしれません。窓ガラスの外側にダンボールで壁を作った時や夜間あるいは曇天時はガラス窓を対象物として認識しているように思えますがそれは外光の影響が減少しているからではないかと考えられます。窓ガラスの外側にダンボールで壁を作った場合は通常の反射光の他に、ガラスを透過してダンボールで反射した後に再びガラスを透過して戻ってきた反射光も受光部のPSDが感知している可能性も考えられます。
・
・
・
(状況)
他の障害物は避けることができてもガラス戸にぶつかることがあって以外に思っていました。
(対応策)
最初赤外線測距センサーの故障かと思ったので苦労してセンサーを交換しましたがその後もガラス戸にぶつかることは時々起きていました。さらに他のERS-111でも同じような事象が見られました。理由はわかりませんでした。ある時もしやと思ってカーテンを閉めたり、ダンボ―ルで壁を作ってみました。すると思いもよらない動きをしました。向きを変えて障害物をよけて通るようになったのです。赤外線測距センサーはちゃんと作動していたようです。ただガラス戸の場合は何か特別な理由がありそうに思えました。
(感想)
最終的な原因究明には至っていません。
①赤外線測距センサーやそこからのデータを処理する電子回路の経年劣化の影響
②対象物の性質、特に近赤外線に対する透過率、反射率、吸収率などの影響
③直接光源からの入射光ではなくても何らかの外光の影響
などが原因として考えられますがよくわかりませんでした。ただERS-111の持つ様々な機能は微妙なバランスの上で作動しているのではないかと推測できました。うまく作られているとあらためて思いました。ガラス戸を含めてタンスや室内の壁への衝突があまりにも目立つようなら赤外線測距センサーを交換するのは解決策の1つになると思います。しかし交換後も時折同じような事象が見られることもあるので断定はできません。
この「赤外線測距センサー関連のある事象」のレポートは私が個人的に経験したことを何かお役に立つかもしれないと思って公開したものです。ここで得た情報(後記の部分を含みます)を参考にして実際に何かを実行される時はすべて『自己責任』にてお願いします。
・
・
・
トップページ(AIBO ERS-111 のバックアップ電池・交換)へ
トップページ(AIBO ERS-111 の経年劣化に伴う問題)へ
トップページ(AIBO ERS-111のバッテリーの軽量化の試み)へ
・