トップページ(AIBO ERS-111 のバックアップ電池・交換)へ
トップページ(AIBO ERS-111 の赤外線センサー交換)へ
トップページ(AIBO ERS-111 の経年劣化に伴う問題)へ
トップページ(AIBO ERS-111のバッテリーの軽量化の試み)へ
AIBO ERS-111を入手して遊んでいましたが、ある時落っことして右後脚の関節部分についているギアの歯を何本か破損してしまいました。電源オンの時はすべてのモーターが稼働しているようです。しっかり踏ん張った状態です。その時例えば落下などのような強い衝撃が脚に加わると関節部分のプラスチック部品が折れたり、あるいはギアの歯が破損してしまいます。そういう状態になった時どう対処したらいいかを考えてきましたが結構難題でした。一番簡単な修復方法は脚のモジュールごとの交換です。しかし時間と手間はかかりますが破損個所の修理と言う方法もありそうです。ここでは個人的にERS-111とどうやったらうまく付き合っていけるかという観点からいろいろ試行錯誤したことをレポートしました。
右後脚の分解をする時次のホームページを参考にさせていただきました。
http://robope.com/aibo/operate/index.htm

右後脚のモジュールを取り外したところです。
・

後から見たところです。
・
・
・
・
・
・

①の作業開始です。
・
・
・
・
・

右後脚の上肢の付け根にカバーがあります。。
・
・
・
・
・

カバーの両サイドにカチッと止める小さな突起があります。うまくカバーの両端をひろげると簡単に上にあきます。
・
・
・
・
・

ネジが1本ありますのでゆるめます。
・
・
・
・
・
・

取り外したカバーとネジです。
・
・
・
・
・

①の作業終了です。
・
・
・
・
・

②の作業開始です。
・
・
・
・
・

上肢のひざ部分にある1本のネジを外します。
・
・
・
・
・

続いて上肢の裏側にあるネジも外します。
・
・
・
・
・

上肢の裏側にあるネジは結構長いものです。
・
・
・
・
・

長いネジと短いネジです。
・
・
・
・
・

上肢のカバーが外れます。
・
・
・
・
・

少し離れて見たところです。
・
・
・
・
・

②の作業終了です。
・
・
・
・

③の作業開始です。
・
・
・
・
・

カバーを外した上肢の前方部分です。
・
・
・
・
・

拡大したところです。
・
・
・
・
・

2つあるピンクのコネクターの下の方(写真では左側)を外します。
・
・
・
・
・

ケーブルを指先でつまんでひっぱると簡単に外れます。
・
・
・
・
・

③の作業終了です。
・
・
・
・
・

④の作業開始です。
・
・
・
・
・

上肢の横部分の一番下に左右2本のネジがあります。
・
・
・
・
・

これらのネジは下肢を上肢につないでいるものです。
・
・
・
・
・

2本のネジを外しました。
・
・
・
・
・

下肢が外れました。
・
・
・
・
・

④の作業終了です。
・
・
・
・
・

⑤の作業開始です。
・
・
・
・
・

取り外した下肢を表側から見たところです。
・
・
・
・
・

後から見たところ。
・
・
・
・
・

後の下にあるネジを緩めます。
・
・
・
・
・

カバーの裏にある突起と下肢部分のくぼみを合わせて止めてあるのでそのままでは外れません。マイナスドライバーで隙間を広げているところです。後で勧化るとこれはあまり意味のない動作でした。
・
・
・
・
・

裏のカバーの爪がなんとかくぼみから外れたのでようやく外すことができました。
・
・
・
・
・

下肢の裏のカバーの裏側です。上に突起があります。
・
・
・
・
・

下肢の裏にあるくぼみです。
・
・
・
・
・
突起がくぼみにすべりこむようにはまり込むことで裏カバーがカチッと固定される仕組みです。
(注) 後脚の場合は突起が上に突き出ておりくぼみには上向きに滑り込ませるようになっています
・
・
・
・

(参考)これは左前脚の下肢の裏カバーを外したところです。くぼみです。
・
・
・
・
・

(参考) 前脚の場合は逆で突起が下に突き出ておりくぼみには下向きに滑り込ませるようになっています。
・
・
・
・
・

右後脚に戻ります。下肢と裏カバーとネジです。
・
・
・
・
・

⑤の作業終了です。
・
・
・
・
・

⑥の作業開始です。
・
・
・
・
・

下肢の裏側の真ん中にあるネジを外します。
・
・
・
・
・

これも長いネジです。
・
・
・
・
・

下肢の表カバーが外れます。
・
・
・
・
・

表カバーと下肢です。
・
・
・
・
・

⑥の作業終了です。
・
・
・
・
・

⑦の作業開始です。
・
・
・
・
・

前方から見たところ。
・
・
・
・
・

内側から見たところ。
・
・
・
・
・

後から見たところです。
・
・
・
・
・

外側から見たところ。
・
・
・
・
・

もう一回内側から見たところです。下の足首にあたる部分に2本のネジがあります。
・
・
・
・
・

拡大したところです。
・
・
・
・
・

左側のネジ。
・
・
・
・
・

右側のネジ。
・
・
・
・
・

2本のネジを外すと足首が取れます。
・
・
・
・
・

しかし足首の内側ではケーブルがまだつながったままです。
・
・
・
・
・

ケーブルをたどっていくと縦長のゴムクッションに覆われたケーブルとコネクターがあります。
・
・
・
・
・

ゴムクッションを持ち上げたところです。
・
・
・
・
・

ケーブルをはずします。
・
・
・
・
・

ここではコネクター同士でつながってはいません。下からきているプリント配線のケーブルの先端をコネクターに差し込んだうえで左右の白い爪を上にあげることで固定する仕組みになっています。
・
・
・
・
・

マイナスドライバーの先端を使って左右の爪を下に押し下げてロックを解除します。
・
・
・
・
・

下肢と足を結ぶケーブルが外れました。
・
・
・
・
・

これは足にあるセンサーからの信号を取り出すためのもののようです。こういう細かいところまできちんと配線がしてあること自体が驚きです。とても細かい作業がされていることがよくわかります。まさに精密器械だと思います。
・
・
・
・
・

⑦の作業終了です。
・
・
・
・
・

⑧の作業開始です。
・
・
・
・
・

下肢の下部分に左右2本のネジがあります。それを外します。
・
・
・
・
・

これは右側のネジです。
・
・
・
・
・

取り外した2本のネジ。
・
・
・
・
・

⑧の作業終了です。
・
・
・
・
・

⑨の作業開始です。
・
・
・
・
・

下肢の内側の上部にあるネジ2本を外します。これは左側のネジです。
・
・
・
・
・

これは右側のネジです。
・
・
・
・
・

左側のネジはとても長いです。しかも結構最初はきついので慎重にゆるめないといけません。あせってねじ山をつぶしたら大変です。
・
・
・
・
・

左右2本のネジを外しました。
・
・
・
・
・

⑨の作業終了です。
・
・
・
・
・

⑩の作業開始です。
・
・
・
・
・

マイナスドライバーの先端をさしこんで下肢のプラスチックカバー(筐体)を開いていきます。
・
・
・
・
・

下の方も広げていきます。
・
・
・
・
・

筐体が開きました。
・
・
・
・
・

中にはギアがびっしり入っています。
・
・
・
・
・

ギアとギア軸が見えます。
・
・
・
・
・

筐体の内側にギアやギア軸を受けるくぼみが作りこんであります。筐体を開いていくとそれらがはずれます。
・
・
・
・
・

勢い余ってあけてしまうとギアやギア軸が飛び散ってしまうので慎重に開いていく必要があります。
・
・
・
・
・

反対側から見たところです。配線ようのケーブルがつながっています。
・
・
・
・
・

慎重に筐体を開いていきます。
・
・
・
・
・

ある程度ギアが外れるのは仕方ありません。あとで直すことにします。
・
・
・
・
・

横から見たところです。再度組み立てる時のために写真も多く写しました。どの部分の写真が必要かは後にならないとわからないことが多いので慎重にたくさん記録したものです。
・
・
・
・

筐体が完全に開きました。
・
・
・
・
・

角度を変えたところです。
・
・
・
・
・

右の大きいギアとつながっているのが下肢と上肢を接続する部分、いわゆる関節になります。落っことした時、折れるのがこの部分です。あるいはこの大きいギアの歯が破損することもあります。
・
・
・
・

一番左にモーターがありその回転が黄色いギア、白いギアなどを伝わって一番右の大きい黒いギアに伝わります。下肢が前後に動く仕組みです。
・
・
・
・
・

横斜め上から。
・
・
・
・
・

上の方向から。
・
・
・
・
・

白いギアと軸が簡単にはずれました。なくすといけないのですぐジップバッグにしまいます。
・
・
・
・
・

⑩の作業終了です。
・
・
・
・
・

⑪の作業開始です。
・
・
・
・
・
・

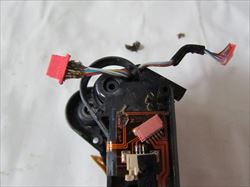
写真は下肢を内側から見たところです。左上から右斜め下にケーブルが伸びています。
・
・
・
・
・
・
・

ケーブルの先にあるコネクターからケーブルを外します。
・
・
・
・
・

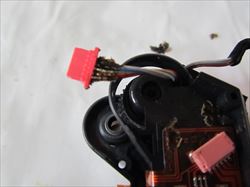
濃いピンクが外れる方のコネクターです。
・
・
・
・
・

コネクターが外れました。
・
・
・
・
・
・
・
左側のケーブルと右側のケーブルは先ほどの大きいギアの中を通ってつながっているようです。
・
・
・
・
・
拡大したところ。
・
・
・
・
・
・

筐体は1本の茶色のプリントケーブルでつながっています。ですから作業がやりにくいので何か工夫が必要かもしれません。
・
・
・
・
・

下肢と上肢を結ぶ関節部分とくっついている大きなグレーのギアが外れました。
・
・
・
・
・
・

拡大したところ。
・
・
・
・
・
・

膝関節が折れた場合そのまま接着剤でくっつけてもすぐ外れてしまいそうです。中に金属製の補強軸を入れることも考えましたがこの関節部分自体がとても小さいのでそれは無理だと判断しました。
・
・
・
・

歯車の歯が破損した場合プラスチック粘土で修復することを考えましたが強度の点で無理だと思いました。破損した部分を大きく切り取って石膏で型をとり溶けた鉛を流し込んで元通りに補修することも考えました。部分入れ歯のような発想です。またこの関節と歯車の破損していない部品を使って石膏で型をとって溶けた鉛を流し込んで金属製の複製パーツを作れないものかとも考えましたがあまりにも複雑な形状をしているのでそれも無理だと諦めました。
・
・
・

ERS-111をうっかり落っことしたが最後、折れるか歯が欠けるので大変厄介な部品です。
・
・
・
・
・

とても重要な部品だと思います。落っことしても破損しないような仕組みが是非望まれるところです。
・
・
・
・
・

メーカーによる修理も部品供給も途絶えている現在では本当に困った問題です。
・
・
・
・
・
・

⑪の作業終了です。
・
・
・
・
・
・
>
膝関節が折れた場合そのまま接着剤でくっつけてもすぐ外れてしまいそうです。中に金属製の補強軸を入れることも考えましたがこの関節部自体がとても小さいのでそれは無理だと判断しました。予備の部品と交換するしかありません。
・
・
・
・

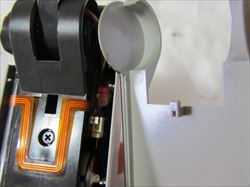
右後脚の膝関節部のギアの歯が破損した写真です。分解しなくても外側から歯が破損している様子が見えます。
・
・
・
・
・

分解したところです。左上の大きいギアの手前部分の歯が欠けています。このギアを予備のギアと交換するしかありません。
・
・
・
・
・

右後脚の下肢部分の筐体を開いたところです。
・
・
・
・
・

膝関節部分のギアとそれに隣合うギアの歯を示しています。
・
・
・
・
・

不思議なことに膝関節部のギアは正常なのにそれと隣り合うギアの歯に破損がみられます。
・
・
・
・
・

この場合はそのギアを予備のギアと交換することになります。
・
・
・
・
・

写真は左前脚の膝関節部のギアとそれと隣り合うギアを示したものです。
・
・
・
・
・
ひどい場合はこれら両方のギアの歯に破損が起こる場合もあります。この場合これら2つのギアを予備のものと交換するしかありません。
・
・
・
・
・

筐体を開いたところです。
・
・
・
・
・

一番右はモーター軸についている小さい金属ギアです。その左側の少し黄色がかった平たいプラスチックギアにつながっています。そのギアの裏側には小さいブラスチックギアがあり左隣の白いギアを回転させています。。
・
・
・
・
・

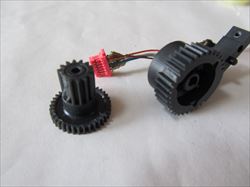
少し黄色いプラスチックギアは簡単に取り外せます。裏に小さなギアがついています。これが白いギアとかみ合っています。
・
・
・
・
・

少し黄色がかったギアを取り除いたところです。
・
・
・
・
・

見る方向を変えたところです。
・
・
・
・
・

白いギアをとりはずしたところです。下には小さいもう1つのギアがついています。
・
・
・
・
・

白いギアの下についている小さいギアが隣の黒いギアの下にある大きいギアを回転させるようになっています。
・
・
・
・
・
モーターの回転は最終的に一番左の黒い大きなギアを回転させます。全部で4段階の変速を行って大きな回転力を生み出すようになっています。
・
・
・
・
・

右後脚の膝関節部のギアです。軸のところは空洞になっていますが半円形をしています。
・
・
・
・
・

その軸受の部分です。金属製の半円形の金属が見えます。
・
・
・
・
・

この軸受部分はこの写真の右側の筐体の下の茶色の部分にあたります。
・
・
・
・
・
分解する前の写真です。この茶色の部分は回転角度検出センサーになっていると思われます。
・
・
・
・
・
横から見たところです。膝関節部のギアと角度検出センサーの位置関係がわかります。
・
・
・
・
・
今ではリーズナブルな落札金額でERS-111をオークションで入手することはそれほどむずかしくありません。それにERS-111はかなりしっかり作られているのでバッテッリーのリフレッシュを行えば大抵問題なく動き出します。ERS-111のハードやソフトの耐久性はかなりなものがあります。ですから新たに購入したERS-111のまだ正常に動く足のモジュールをはずして故障したERS-111の足と交換すれば治ります。ただ問題は足を取られた方のERS-111が不良品の状態になってしまいます。壊れてジャンク扱いになったのならまだしも、まだ動くことができるところからモジュールを持ってくるのは問題があります。
たまにオークションで足の故障したものが出品されることがあります。ごく最近も左足を破損したERS-111が出品されていました。しかしこれもいくつか問題点がありました。結構価格が高いところまでいくのです。さらに片足を破損しているとはいえ、他のモジュールは本体を含めて結構いい状態のものが多いようです。それを入手して、私の場合右足モジュールを再利用すればいいのですが、逆に私のもっているERS-111の左足モジュールを新しく入手したERS-111の壊れている左足として利用することもできます。結局、中途半端なERS-111が2台存在することになります。交代で動かすにもその度にモジュールを外したり、取り付けたりしないといけません。電源コネクターの接触部分に不良が生じる恐れがあり、あまりやりたくない方法です。結局この案もベストとは言い難いと判断しました。
ERS-111は電源オンの状態では常にモーターが稼働しており、目いっぱい踏ん張った状態になっています。そのため落下などで足に強い衝撃が加わるとひざ関節部分が折れたり、私の場合のようにギアの歯が欠けてしまいます。ギアの歯が欠けるとモーターの回転が伝わらず空回りをするので歩行がおかしくなります。ギアそのものを修理する必要があります。しかしこのギアは上肢と下肢をつないでいる関節部分と一体となっています。単体のギアではありません。ロボット製作用のギアも市販されてはいますがそういう一般的なものでなく特殊な作りだと思います。関節部とギア部の一体化した新しい部品を丸ごと交換する必要があります。そのためにはジャンクERS-111の予備パーツが必要ですが一般的にはそれの入手は結構難しいと思われます。
正常に動くERS-111の右後足を分解して関節部とギア部の一体となっている部分を取り出し、同じものを3Dプリンターで作製すればいいのではないかと考えました。しかし私は3Dプリンターを持っていません。また3Dプリンターのある事業所に相談したところ3Dプリンター用の通常の材料はそれほど強度が期待できないとのことでした。改良されたより強度のある材料もあるとのことでしたが実際にやってみないとこちらの期待通りの強度がでるかは不明とのことでした。また図面がないのでスキャナーでデータをとるのに別途料金がかかるそうです。結局納得がいくものを3Dプリンターで作るとオークションに出品されているERS-111が数台入手できる位の費用になりそうでした。
上記⑪の中でも記しましたが破損した箇所そのものの修理や修復はほとんど不可能だと判断しました。あまりにも複雑な形状、小さい部品でかつ精密に作られているので部分的な修理も全体の複製の作成も諦めました。せめてメーカーから補修用部品の供給がなされていればありがたいのですが今となってはそれも期待できません。
・
(状況)
オークションでたまに脚の破損したERS-111を見かけていましたが自分で落っことして脚のギアを破損するとは思っていなかったのであせりました。
(対応策)
実際に手持ちのERS-111の脚破損に伴っていろいろ考えたり、情報を探したりしました。
(感想)
最初それほど難しくないと思った脚修理がかなり大変な作業であることがわかりました。現在のところまだ自分では実際に脚修理をしたことはありません。ただ今回いろいろ情報を得たり検討しましたので、代わりのパーツさえ入手できれば膝関節部分の破損やギアの歯の欠損に対応できるのではないかと考えています。
この脚修理の検討レポートは私が個人的に経験したことを何かお役に立つかもしれないと思って公開したものです。ここで得た情報(後記の部分を含みます)を参考にして実際に脚の修理などを行ったりその他何かを実行される時はすべて『自己責任』にてお願いします。
・
・
・
トップページ(AIBO ERS-111 のバックアップ電池・交換)へ
トップページ(AIBO ERS-111 の赤外線センサー交換)へ
トップページ(AIBO ERS-111 の経年劣化に伴う問題)へ
トップページ(AIBO ERS-111のバッテリーの軽量化の試み)へ
・